Привет.
Идея для статьи появилась после недавней презентации Xiaomi, где, показав антропоморфного робота-гуманоида CyberOne, компания в очередной раз удивила масштабом амбиций. Причем амбиций, которые подкреплены необходимыми компетенциями. Безусловно, Xiaomi далеко не первые и однозначно не лучшие, но отрицать успех бессмысленно. Человекоподобного робота они сделали.
Характеристики у CyberOne далеко не человеческие, но в Xiaomi заявляют о большом потенциале и прочат роботу статус помощника по дому. И если дизайн гуманоида восхищает, а уровень технологий, что задействованы при его производстве и в его конструкции, вынуждает одобрительно кивнуть, то вот утверждение о его будущем в качестве «помощника» возвращает к реальности и вызывает не более чем усталую улыбку. А почему именно усталую — давайте разберемся.
Патентный ландшафт антропоморфных роботов весьма разнообразен. Мое знакомство с ними началось с разработок Boston Dynamics. Думаю, их прыгающего робота Atlas все видели на YouTube. Уровень его мастерства при выполнении некоторых акробатических трюков оказался настолько высок, что многие перепугались за сохранность человечества и начали разбредаться по бункерам в ожидании восстания машин. Дело в том, что, как обычно, многие склонны драматизировать события, окрашивая их во «всепропальщические» цвета. Главным доводом было то, что «вот еще пара лет, и визуально робот станет копией человека, а ИИ, подключенный к Интернету, уже сейчас не отличить от живого собеседника». Однако стоит понимать, что, несмотря на тот факт, что первые версии Atlas’а создавались путем обвешивания металлической рамы необходимым оборудованием по принципу «давай же, наконец, работай» с перспективой дальнейшего улучшения облика, последующий процесс очеловечивания вовсе не двигался семимильными шагами. И когда инженеры дошли до стадии разработки, на которой уже нужно начинать беспокоиться о защите интеллектуальной собственности, и стали оформлять заявки на выдачу патентов, изделие действительно больше походило на человека:
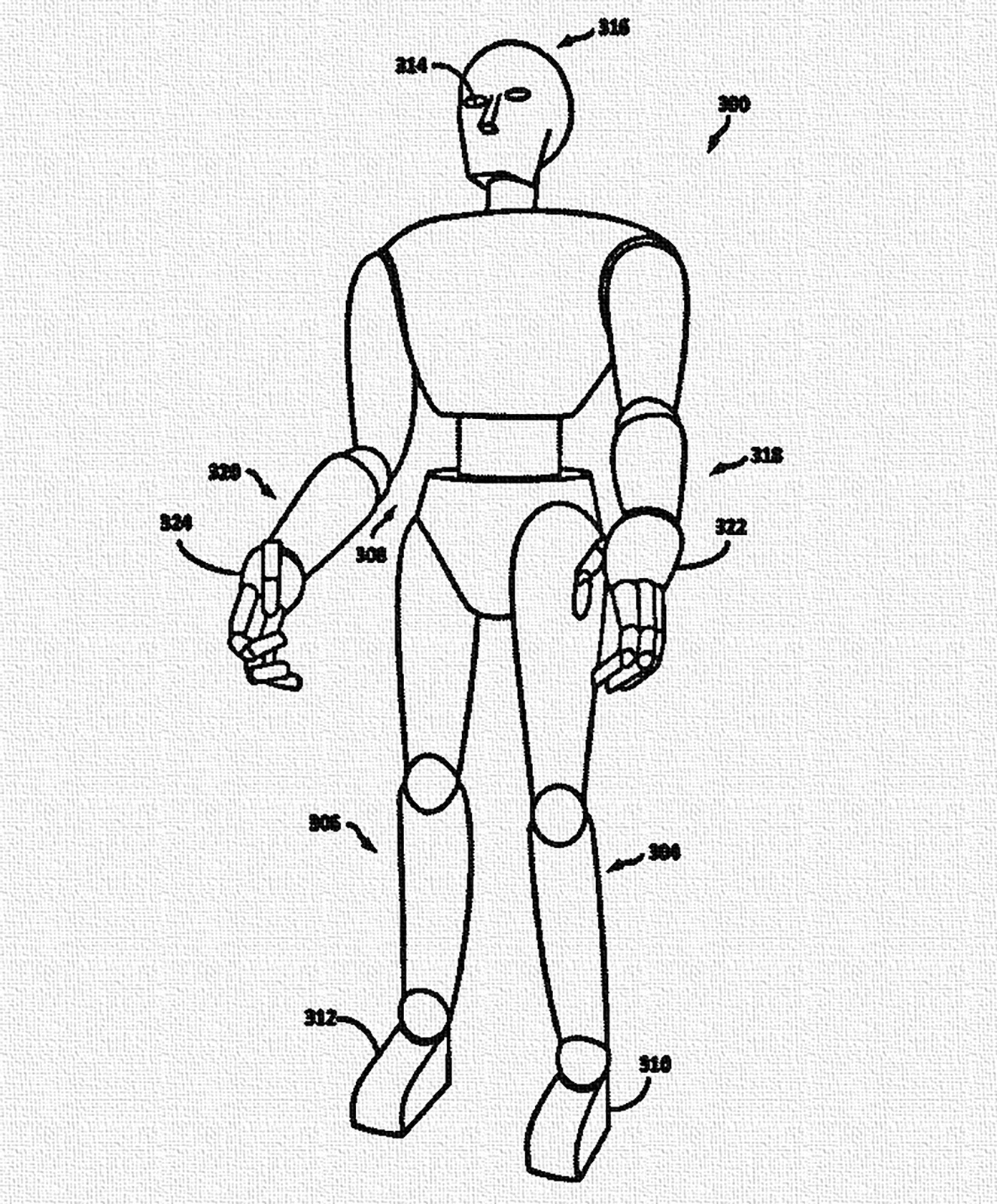
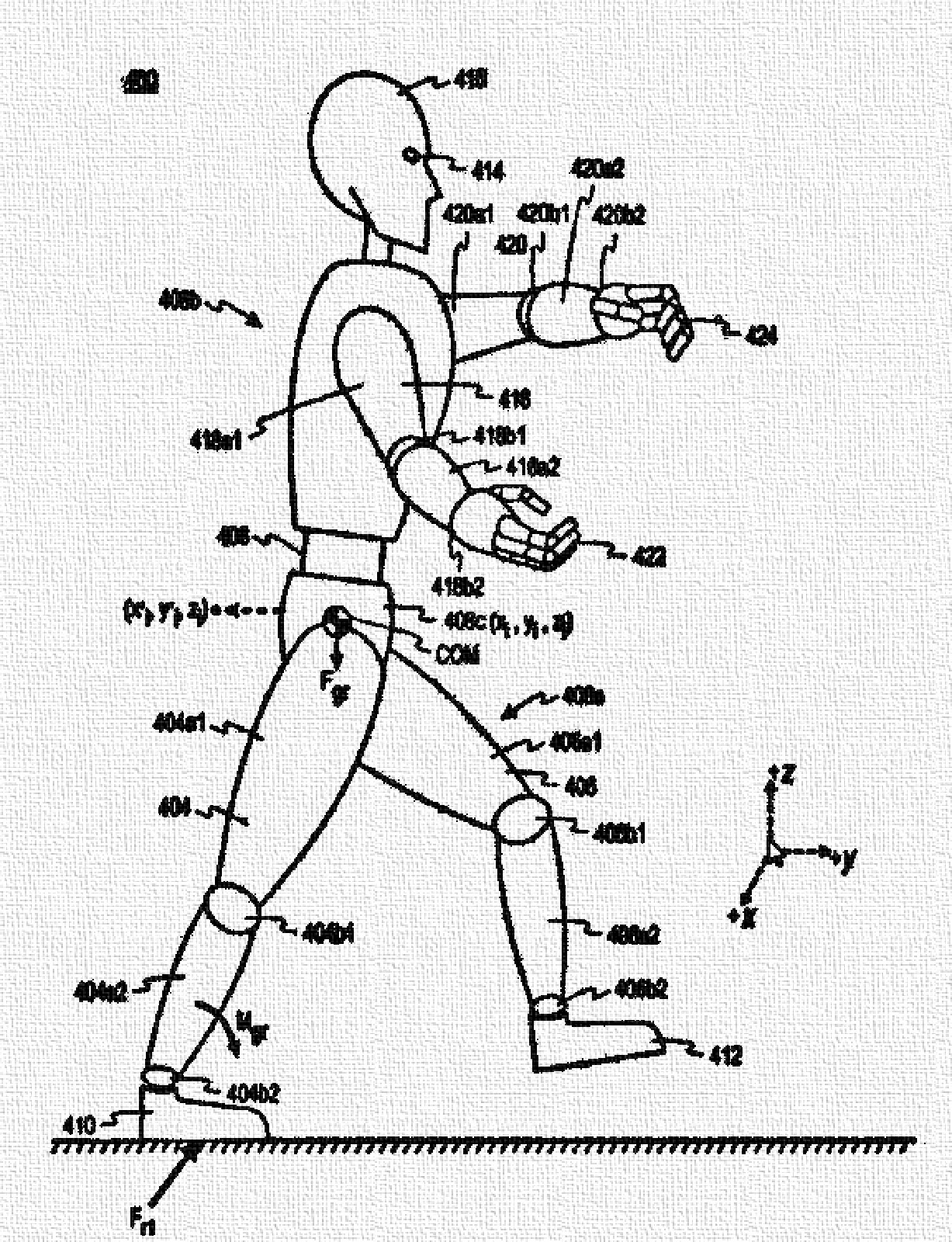
Это иллюстрация из заявки на изобретение US20190283822A1. Однако такие картинки инженеры обычно делают, разрабатывая общую технологическую концепцию будущего устройства. На этой стадии нет смысла учитывать механизмы скелета и суставов, а также объемы полостей и камер для размещения основных узлов. Важно защитить антропоморфного робота как такового. В заявке описывалась технология манипуляции телом двуногого робота с использованием динамического баланса:
Но уже после анализа размеров искомых компонентов, необходимых для реализации задуманной технологии, ребята из Boston Dynamics предложили альтернативный облик своего творения:
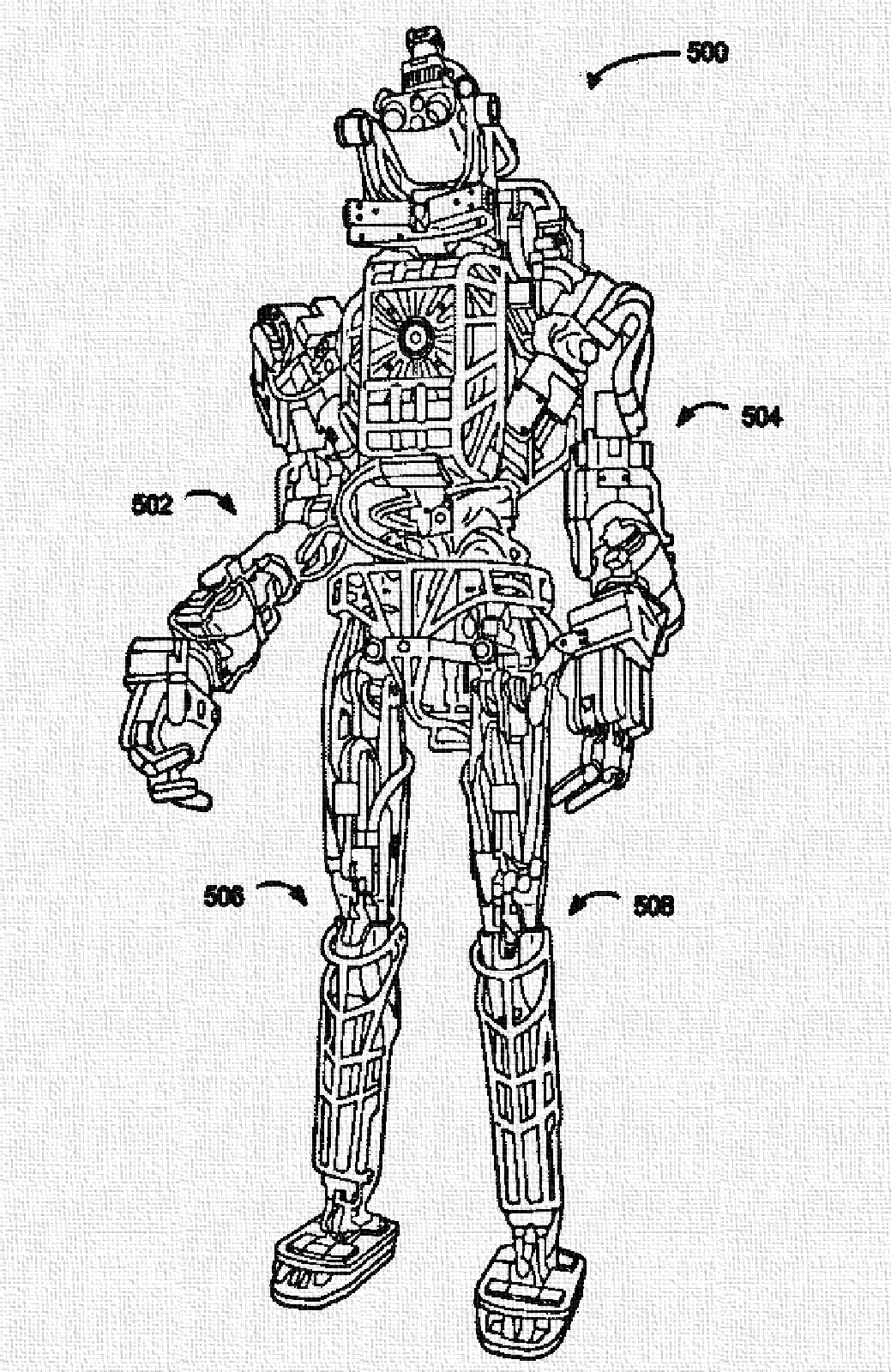
Это иллюстрация из заявки US20210347041A1 на оптимизацию поведения робота в автономном режиме. Видно, что по сравнению с видеороликами конструкция уменьшилась, приняты во внимание пропорции человеческого тела, появилось подобие черепа. Но робот все еще далек от прямого сравнения с человеком. Впрочем, Boston Dynamics явно не спешили складывать все яйца в одну корзину, и параллельно с Atlas’ом в их портфолио себя вполне комфортно чувствовало вот такое чудище:
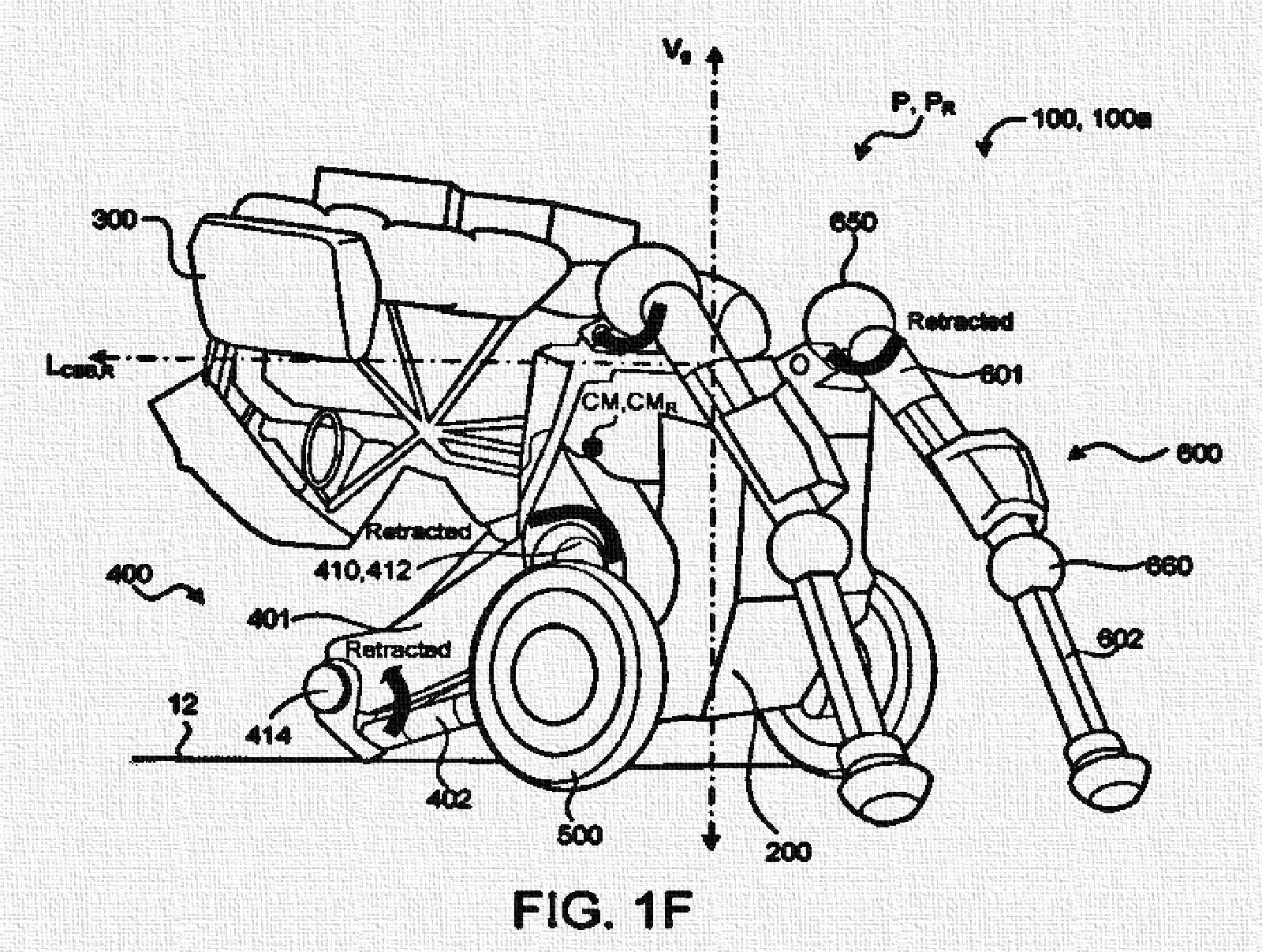
Заявка US20190258274A1 была подана на «Мобильного робота с возможностью сидеть и стоять». Мы его знаем под именем Handle. Причем если на предыдущей иллюстрации у робота предусмотрен единственный манипулятор с вакуумным устройством для захвата предметов, то в «сидячем» виде мы можем видеть уже подобие рук:
Ну а в позе стоя его вообще издалека можно принять за туриста с рюкзаком, решившего воспользоваться гироскутером:
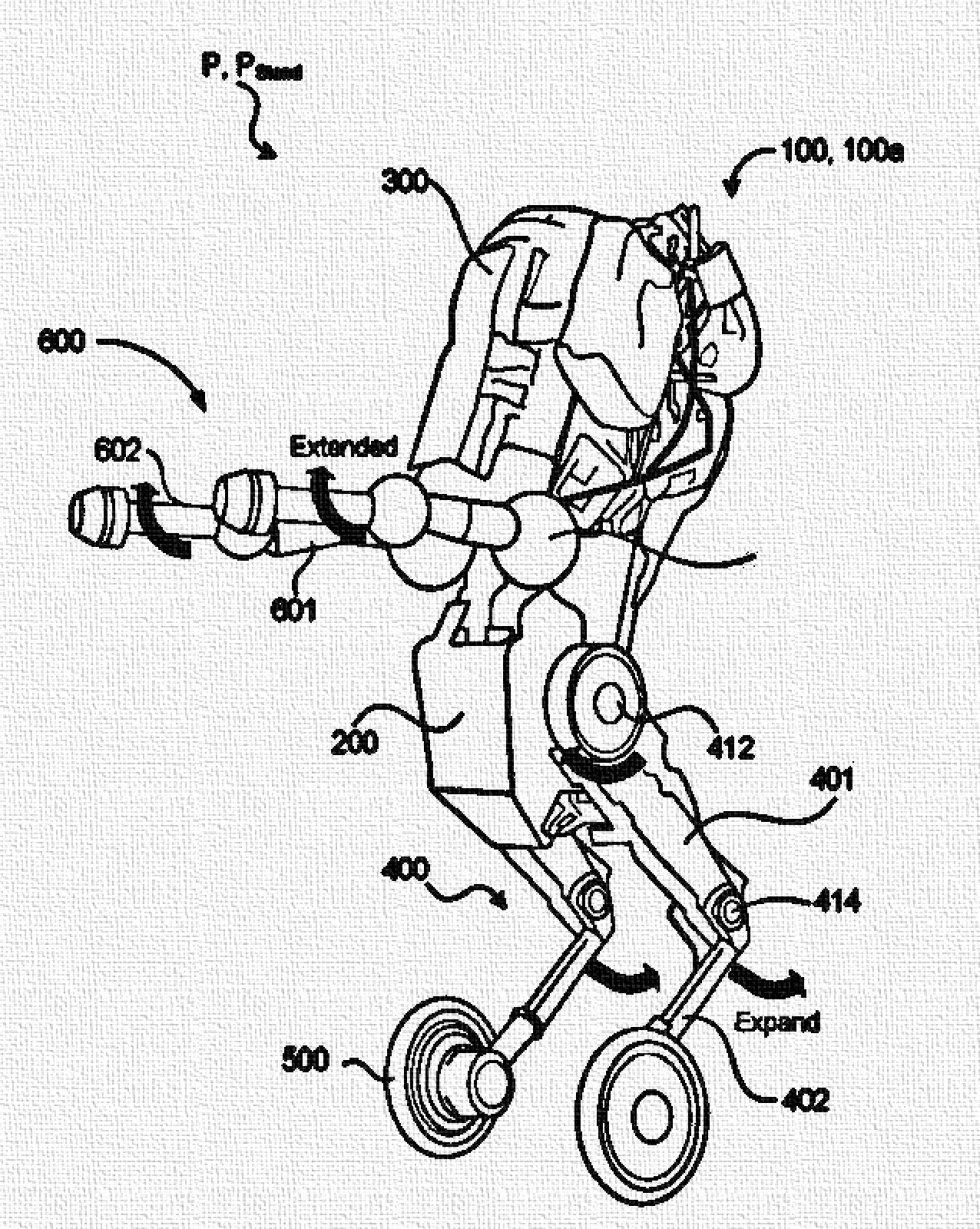
Ключевой особенностью изобретения, по данной заявке, как раз и является использование колес. Может показаться, что ноги со ступнями для равновесия лучше, но это не так. Перемещаясь на двух ногах, роботу для поддержания равновесия необходимо их постоянно переставлять. Версия же на колесах может позволить себе наклоны при поворотах и ускорение, благодаря изменению крутящего момента приводных двигателей. Кроме того, смещение баланса вперед или назад позволяет использовать инерцию.
Объединить несколько ключевых признаков заявляемого бостонцами изобретения воедино взялась в своей заявке на «Человекоподобного робота с маневренностью, как у человека» некая Карла Джиллет:
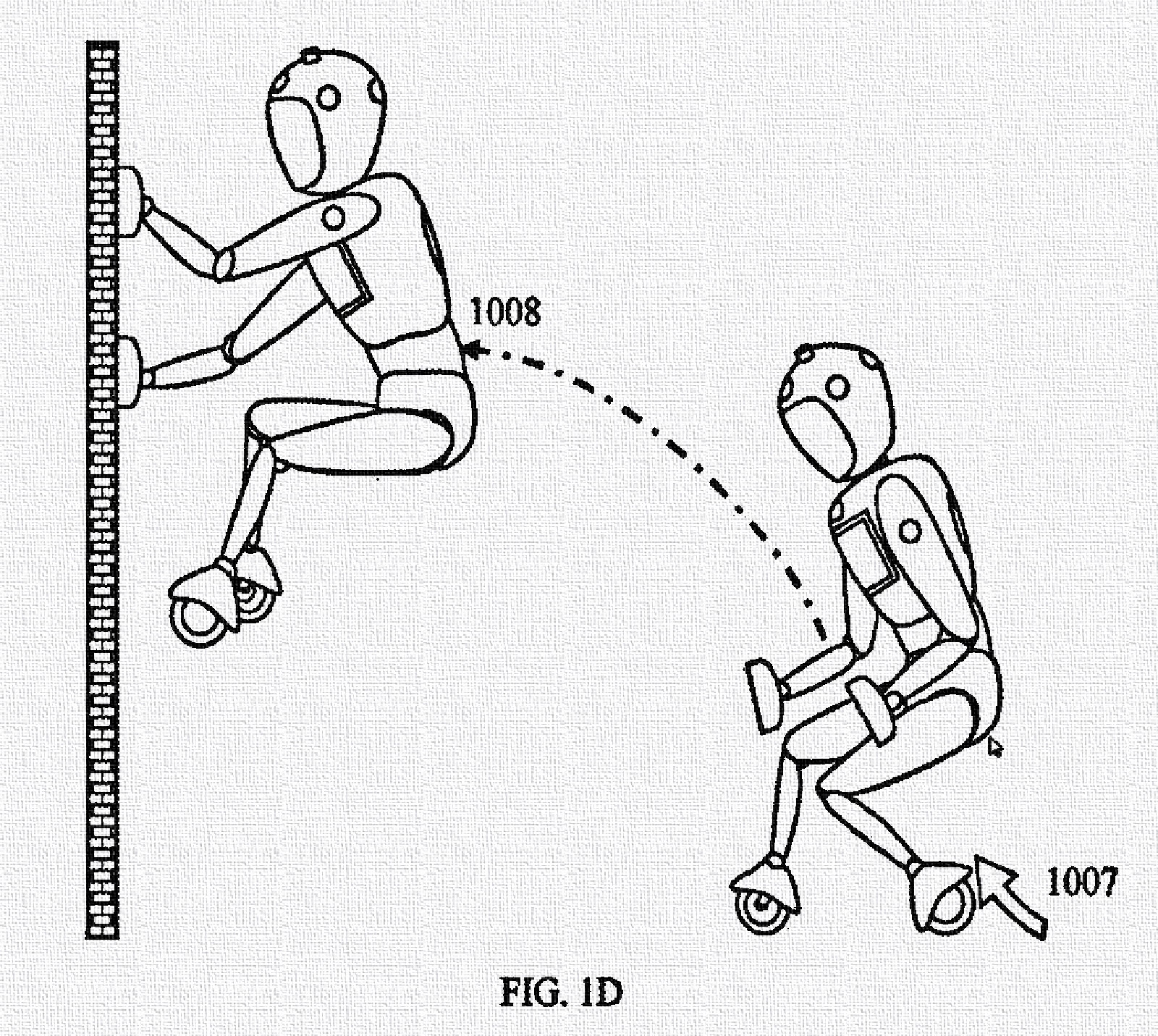
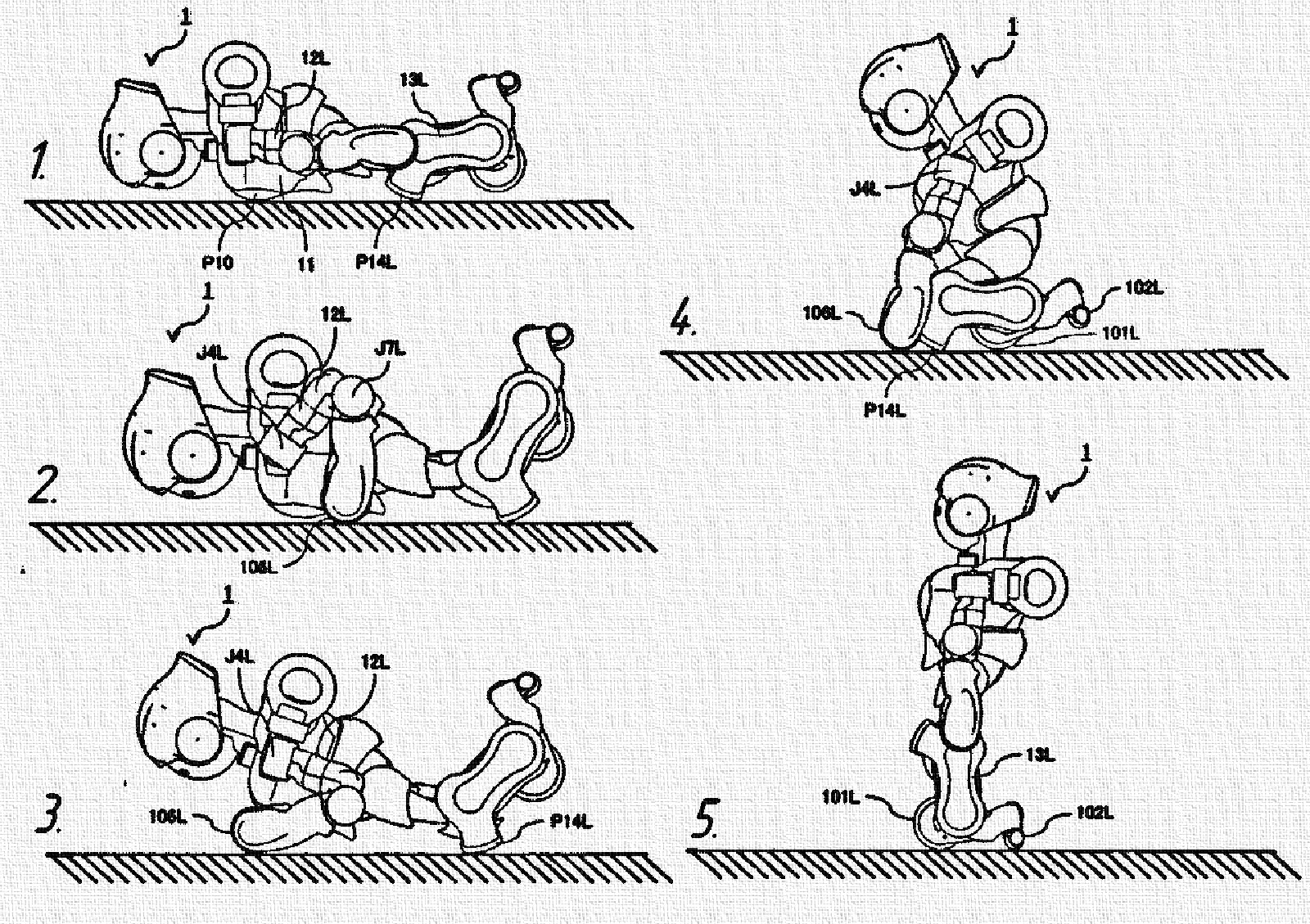
При этом видно, что основные элементы беззастенчиво позаимствованы из материалов Boston Dynamics. При должной интеллектуальной сноровке, кстати, это весьма действенный способ получить патент на чужую разработку и при этом не оказаться патентным троллем. Как-нибудь потом расскажу вам, в чем разница. Чтобы усилить свое изобретение новым техническим результатом, Карла даже продемонстрировала процесс подъема робота после падения, как бы заявляя, что она учла все детали:
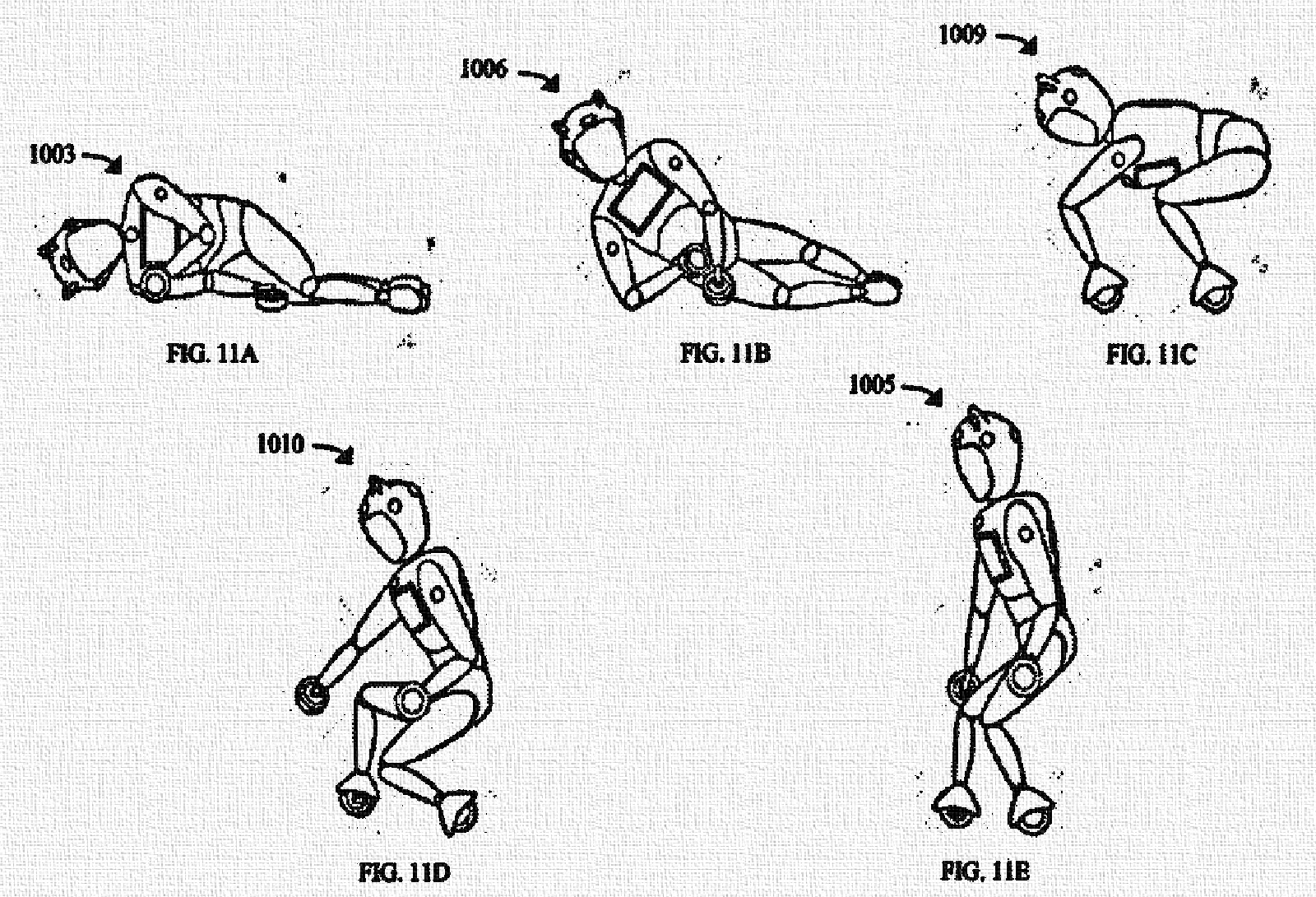
Пытливый наблюдатель, правда, сразу отметит тот факт, что в заявке описываются главным образом теоретические возможности такого типа роботов, поскольку если обратить внимание на тонкости процесса осуществления тех маневров, что нам продемонстрированы, возникнет больше вопросов, чем ответов. И если бы автор была самой-самой первой с такой идеей, то заявка превратилась бы в патент. А этого не произошло. А еще у данного робота была предусмотрена док-станция для подзарядки:
На мой взгляд, замена кистей с удерживающей функцией на ролики обнуляет функционал такого изобретения. И без того иллюзорная ценность такого робота совсем улетучивается. Нет, конечно, если вы делаете игрушку вроде той, что запатентовали Hitachi, демонстрируя ее возможности, тогда цель оправдана:
К слову, конструкция этого робота уникальна. Разработчикам антропоморфов стоило бы взять ее на вооружение. У него отлаженная система баланса, которая, благодаря парным колесам на ногах, позволяет с меньшими затратами, нежели у Handle, осуществлять крен во время поворота и сохранять устойчивость:
Однако на руках у данного робота все те же ролики. Видимо, его не предполагалось использовать иначе, кроме как в качестве рекламного щита компании. Но, несмотря на его игрушечный облик, только посмотрите, что он умеет:
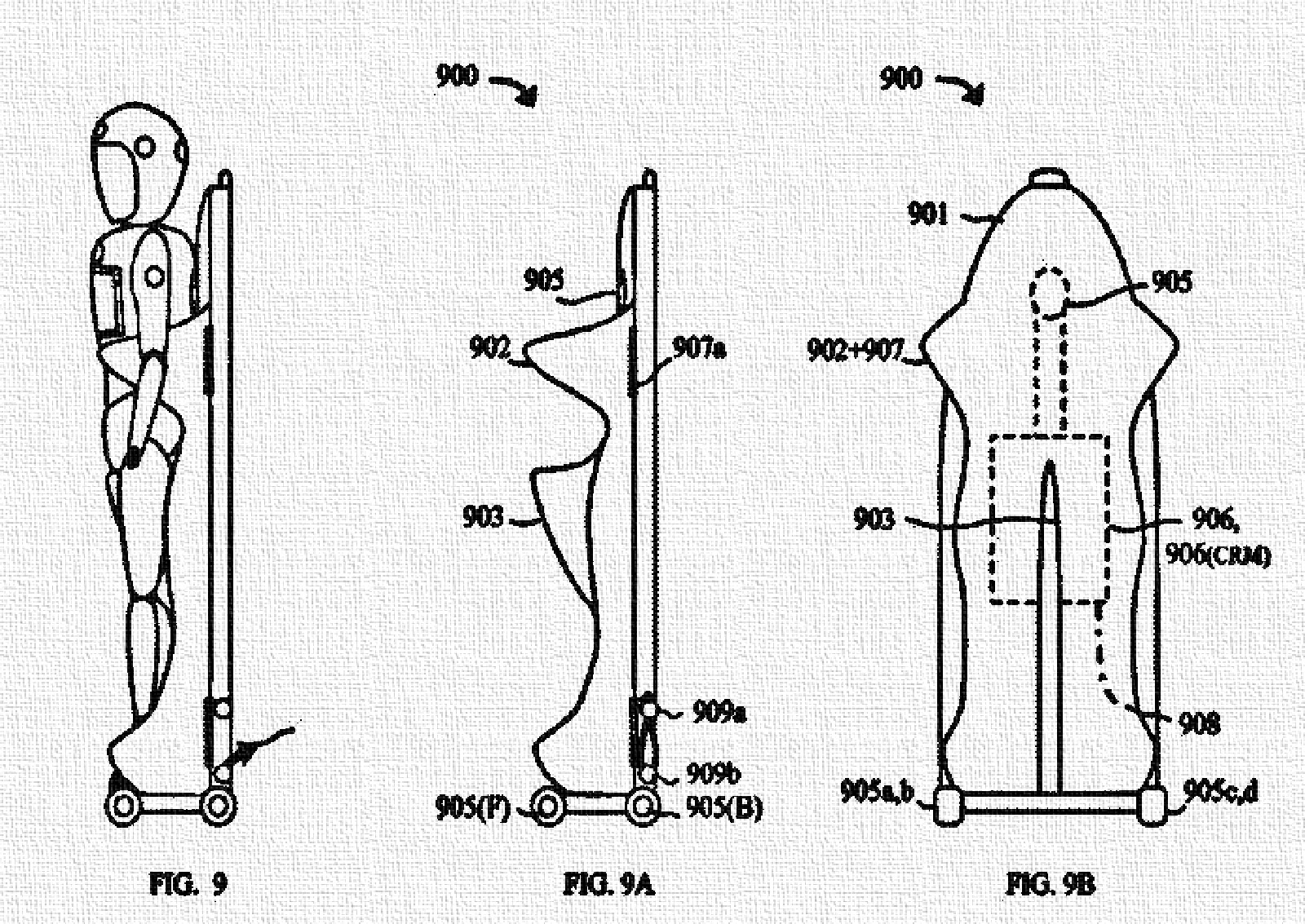
Впрочем, это и неудивительно, если принять во внимание то, с каким размахом конструкторы подошли к проектированию его кинематической схемы. Сами посмотрите:
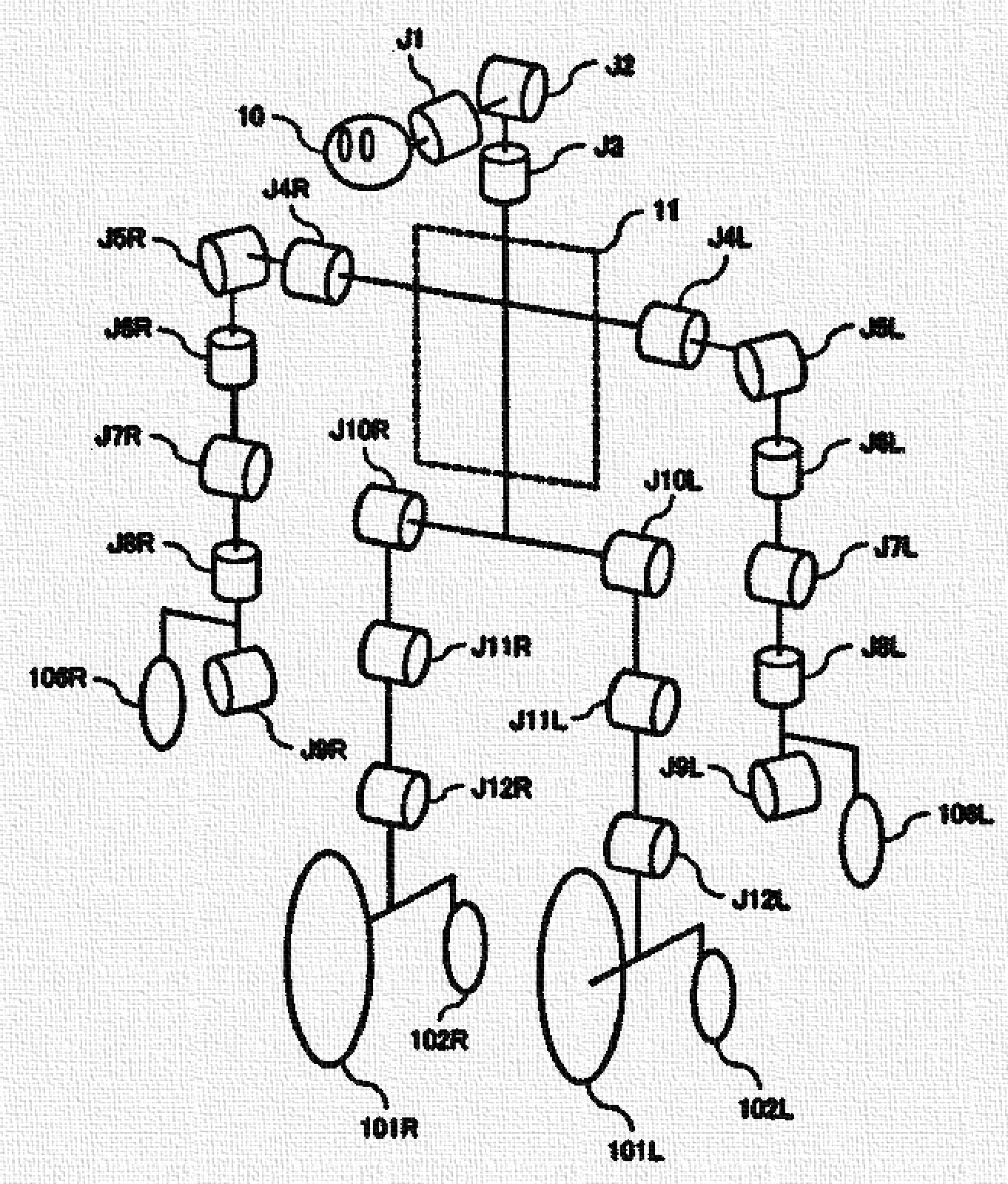
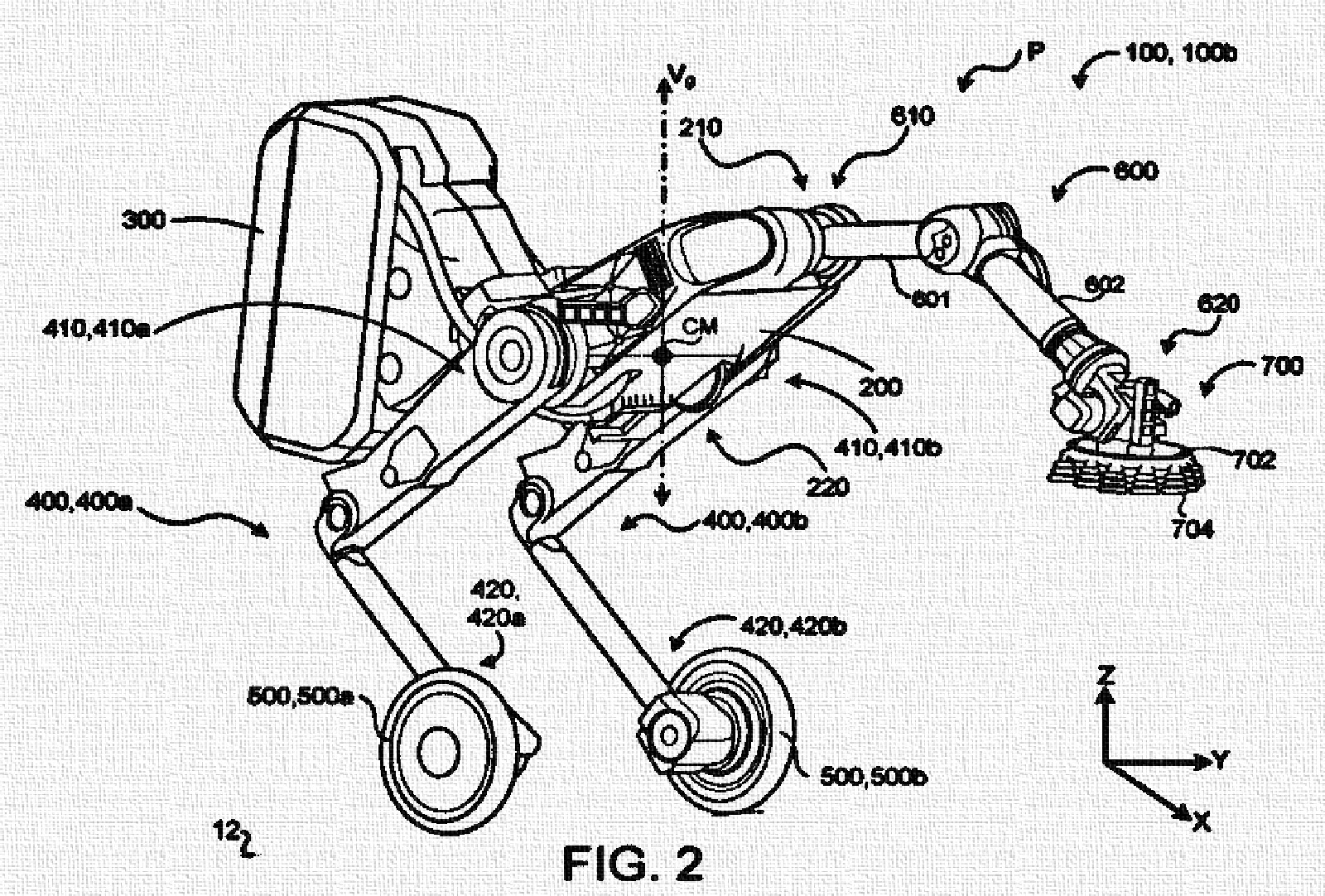
Но если не учитывать достигаемый изобретением технический результат в виде снижения вероятности падения робота при потере питания, это всего лишь игрушка. Ее, конечно, можно использовать в качестве промоутера в торговом комплексе, но, согласитесь, затраты непропорциональны полезности. Более продуманную концепцию робота на колесах и с вменяемым сценарием использования предложил Институт электроники Гуанчжоу:
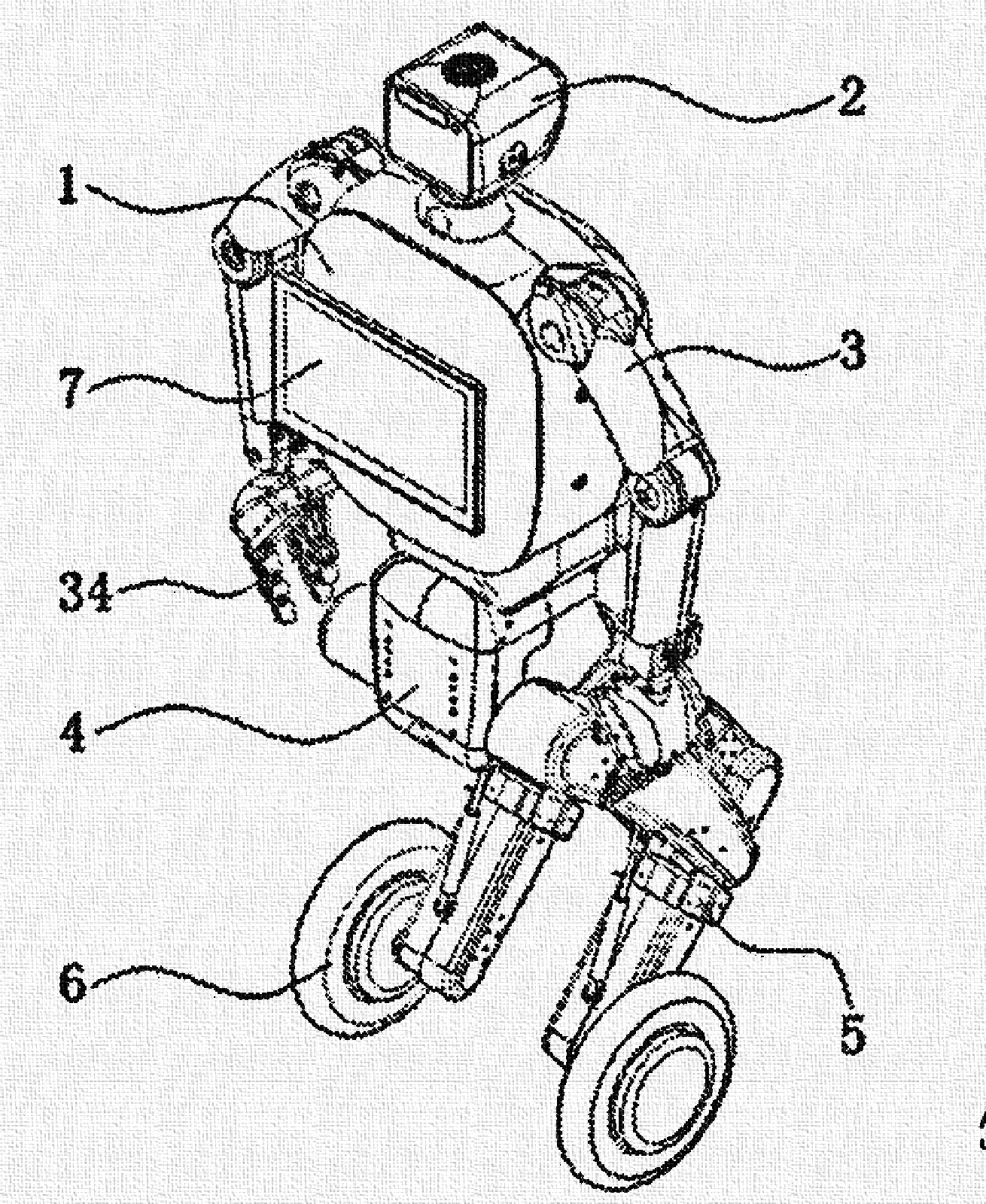
Робот копирует у Handle ходовую часть с «кенгуруподобными» ногами на колесах:
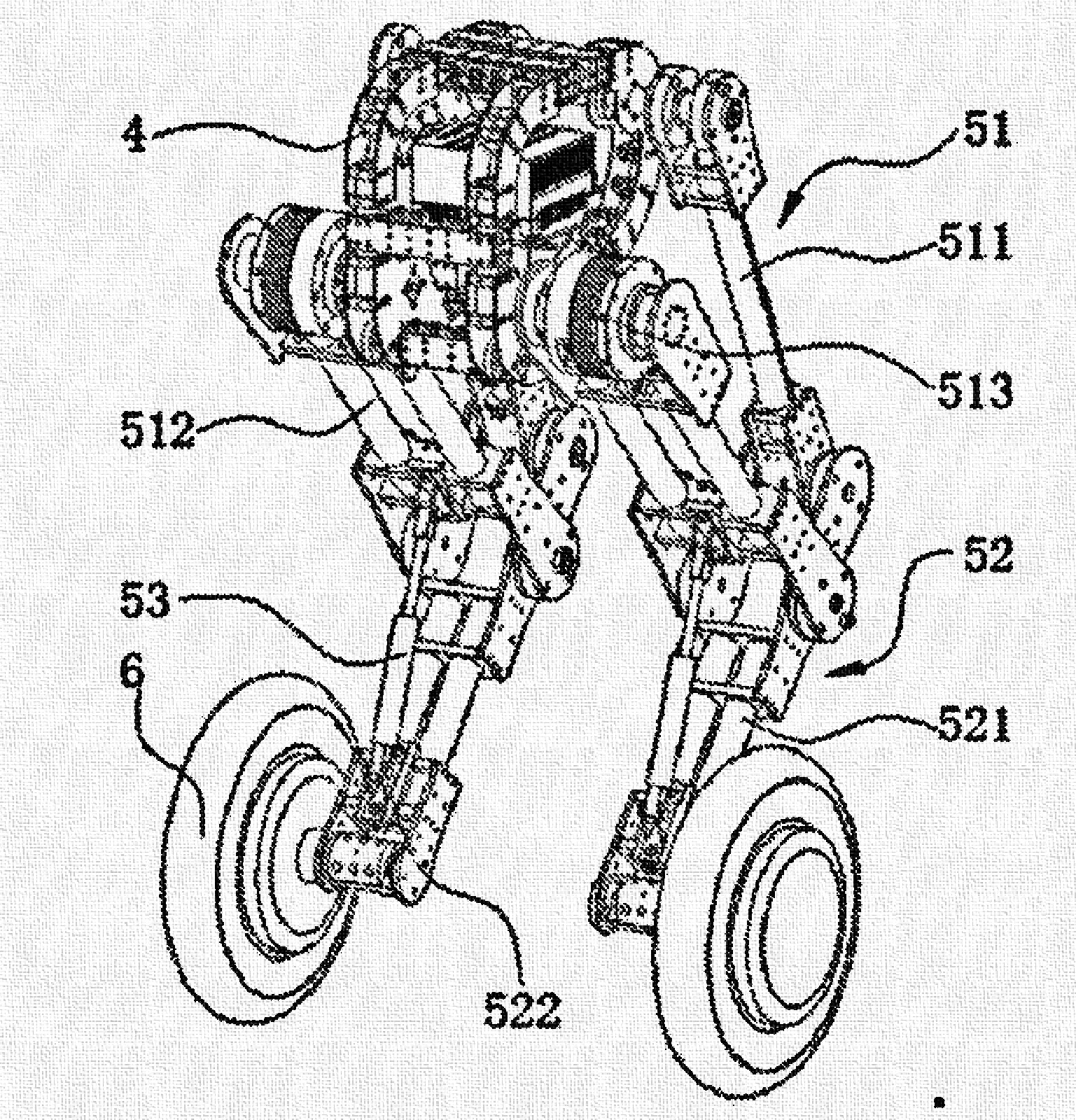
Руки же, в отличие от Handle, выполнены по вполне себе привычному человеческому образу и подобию:
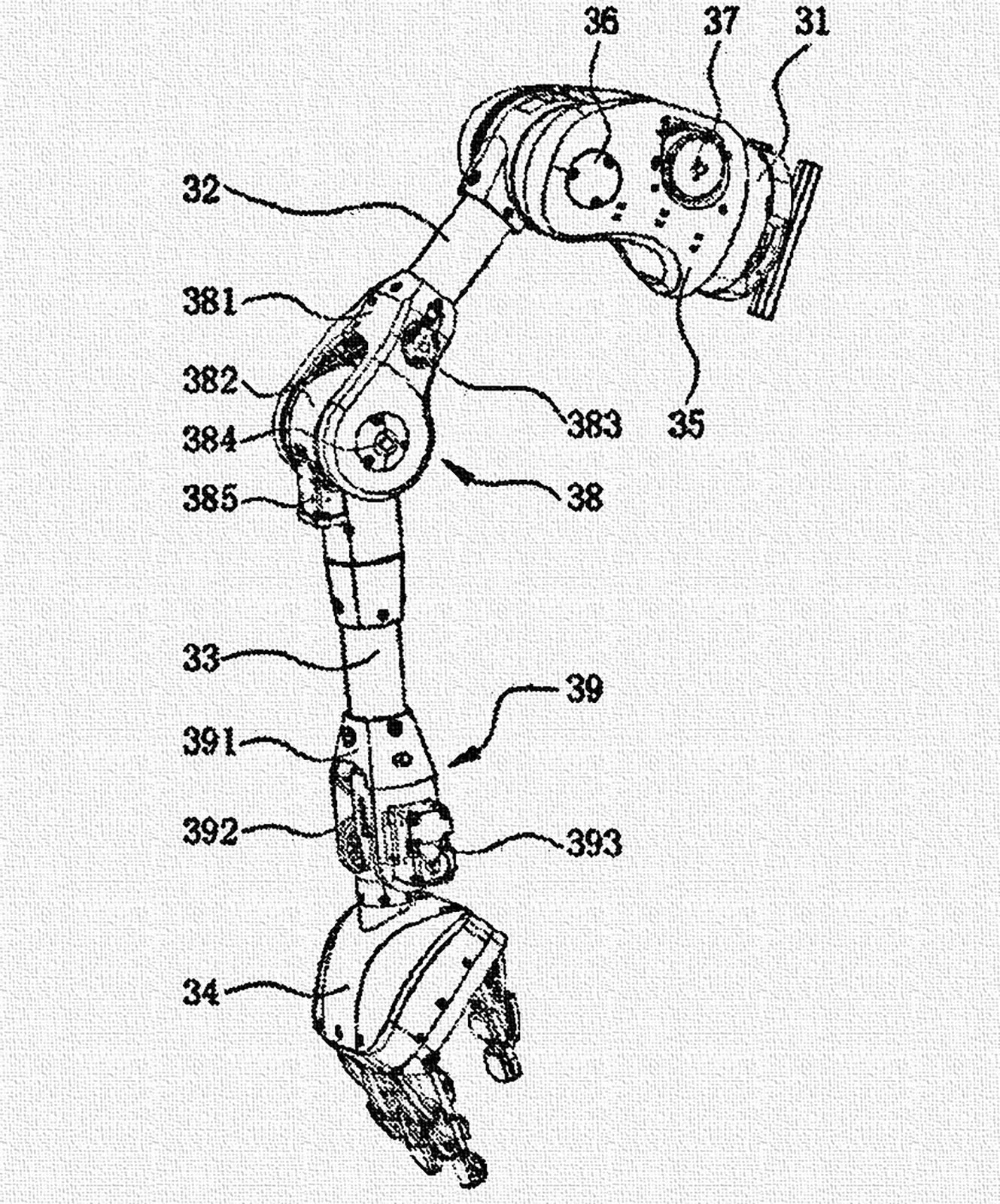
Данный робот, судя по описанию в патенте, предназначен для ухода за пожилыми людьми в домашних условиях. Он способен осуществлять быструю диагностику основных жизненных показателей, двигаться вверх и вниз, в том числе по лестнице, а также адаптироваться к сложной и изменчивой внешней среде. Что именно авторы патента имели в виду, говоря об адаптации к внешней среде, я не понял, возможно, что в дождь он может взять зонтик. Внутри же головы робота установлено устройство связи с медицинской службой. В общем, достаточно продуманное изобретение для реализации заявленного технического результата. Кроме того, данный пример соответствует тому принципу, который, в общем-то, оправдан при создании роботов. Проектирование под задачу. Робот не демонстрирует инновационного подхода кинематической схемы, как у Hitachi, и наверняка не будет способен сделать обратное сальто, как Handle. Он предназначен для конкретных целей, но все же, как и робот Xiaomi, конструктивно слишком сложен для тех задач, что перед ним поставлены. Следует пояснить.
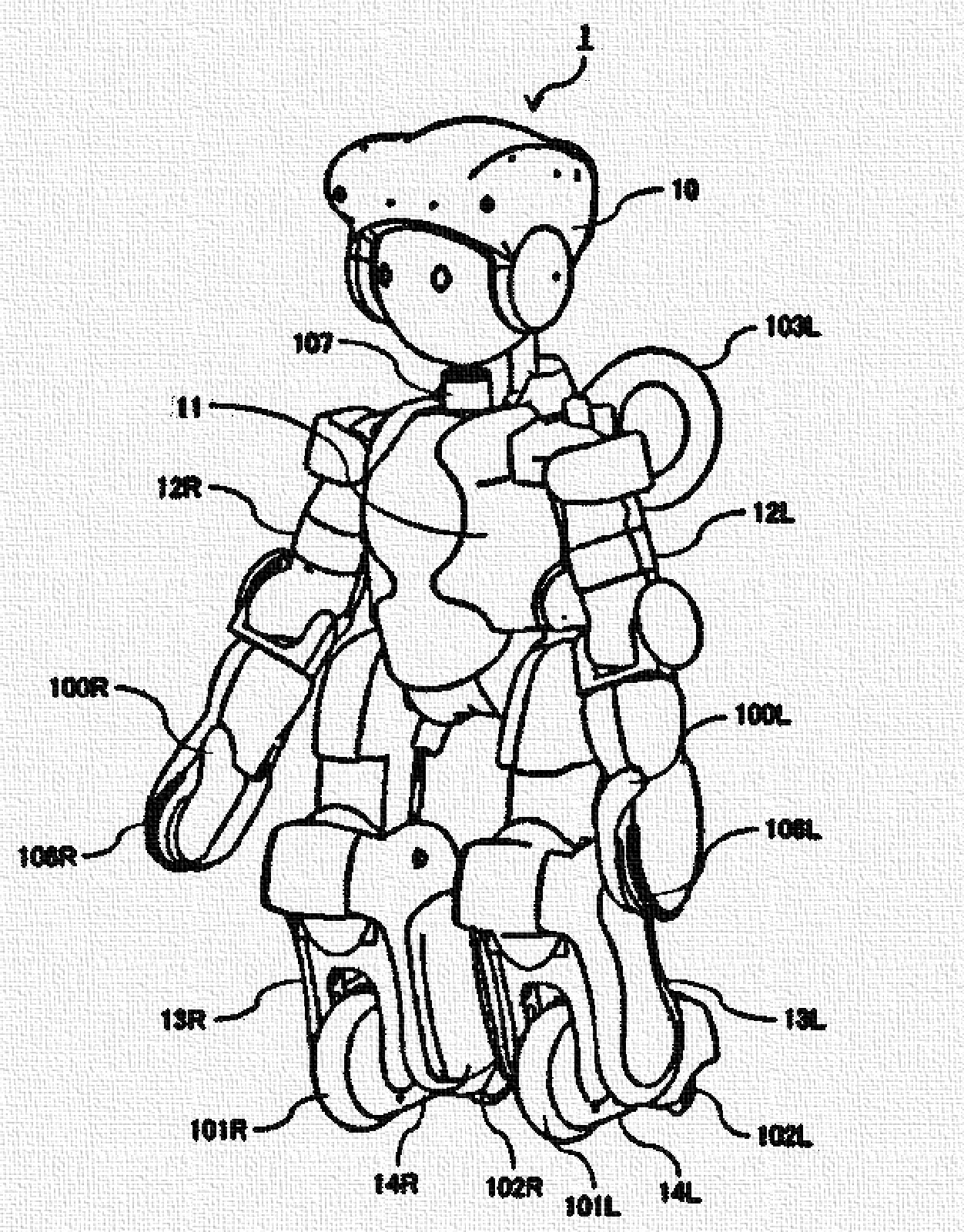
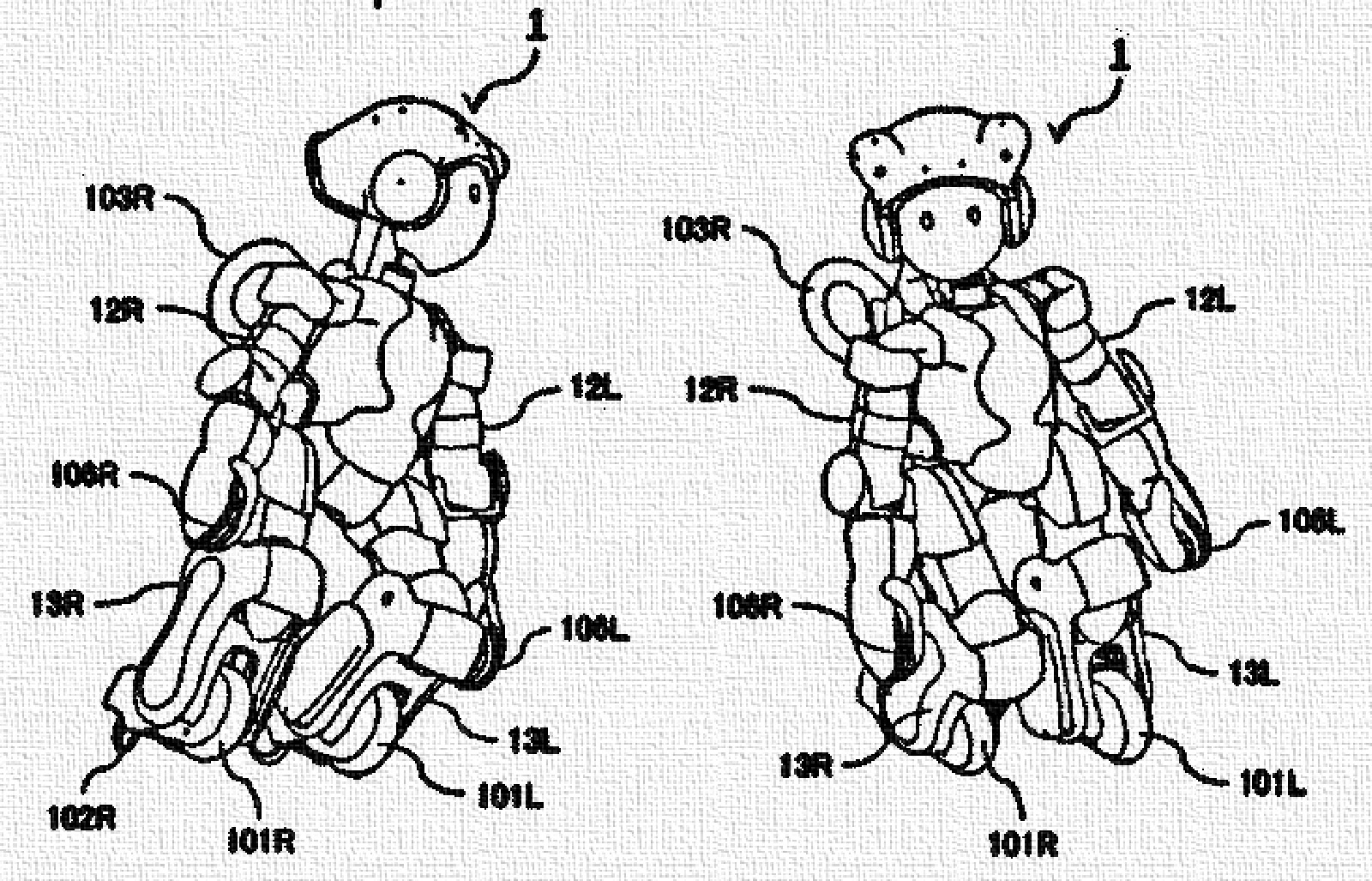
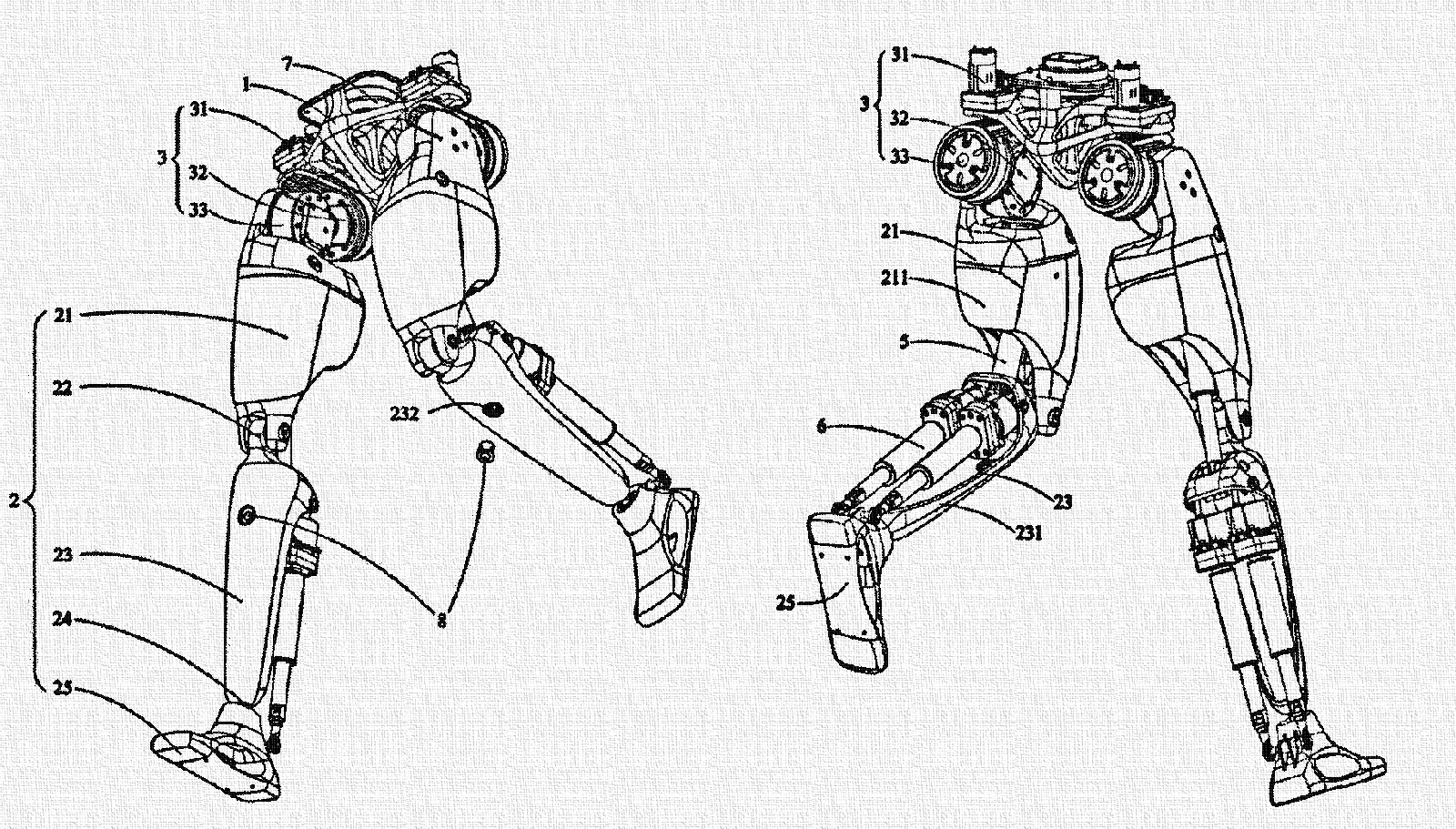
Дело в том, что антропоморфные роботы — они как дети. Еще не решили, кем станут, когда вырастут. Они — венец творения, но еще только начинают свой путь. И если навязывать новорожденному роль специалиста узкого профиля в отрасли, например, бухгалтерского учета эгоистично, то робота спрашивать необязательно. Соответственно, еще на стадии проектирования в таких устройствах предусматриваются конструктивные и программные особенности, обуславливающие их использование в совершенно конкретных областях. А у антропоморфных роботов таких особенностей нет. Они одинаково бездарны во всем, если сравнивать их с узкоспециализированными роботами. С роботом-курьером, например. Кто первым донесет пиццу, антропоморф или самоходный шестиколëсный контейнер условного «Яндекса» с манипулятором для открывания двери? Зачем делать роботу ноги, аналогичные человеческим, если он не сможет их использовать на уровне, хотя бы близком к человеческому? Попытки повторять живую природу похвальны, если мы пытаемся сделать протез, но воспроизводить ее в роботе — и дорого, и трудно, и, скорее всего, не следует. Это возможно. Но посмотрите на иллюстрацию ниже и представьте, сколько систем должны согласованно отработать, чтобы такой робот прошёл два метра.
Безусловно, антропоморфные роботы поражают воображение, но и только. Функционально они очень ограничены и призваны не более чем обратить внимание на инновационность компании-разработчика. О Xiaomi, несомненно, говорят. Робота Tesla тоже ждут, потирая руки. Но дальше разговоров, уверен, дело не пойдёт. Илон Маск и сам только скромно заявляет о скором снижении стоимости роботов-гуманоидов, но никаких конкретных сценариев их использования не приводит. А вы как думаете, есть ли вообще какой-то смысл их делать?
Может, у вас есть идеи, как можно было бы использовать таких роботов? Поделитесь в комментариях.