Привет.
На момент написания данного материала у нас вышел только один текст по выставке в Барселоне. С ним можно ознакомиться по ссылке ниже:
Эльдар рассказал там про очередного гуманоидного робота. На этот раз отличилась компания Honor. Я не разделяю восторга вокруг этих устройств и не испытываю энтузиазма касательно перспектив их развития. На мой взгляд, это утопия чистой воды. Человек слишком дешев (как бы цинично это ни звучало), чтобы обслуживать его роботами. Именно поэтому улицы все еще убирают дворники, а на кассах сидят живые кассиры (привет, Amazon Go). Все потому, что даже сегодня кассы самообслуживания не могут похвастаться стопроцентной самостоятельностью и периодически требуют участия консультанта. Ну а что? Вдруг вы вместо обычных креветок королевские себе взвесили. Нужно вывести вас на чистую воду. Впрочем, сегодня не будем спорить о целесообразности железных каратистов. Нам интереснее предложить альтернативное решение. И Lecron опять подбросил повод поизобретать. Но об этом чуть позже. Сначала еще пара слов по «Уголку №118».
Обратная связь
В прошлом выпуске мы уже поговорили о вариации на тему умных колец, которые мы превратили в устройства управления, но кое-что я все же упустил. Если обратите внимание на картинку на превью того материала, то вы заметите довольно корявый набросок от руки того самого кольца. Но это не моя самодеятельность. Это иллюстрация из патента Apple на такое кольцо.
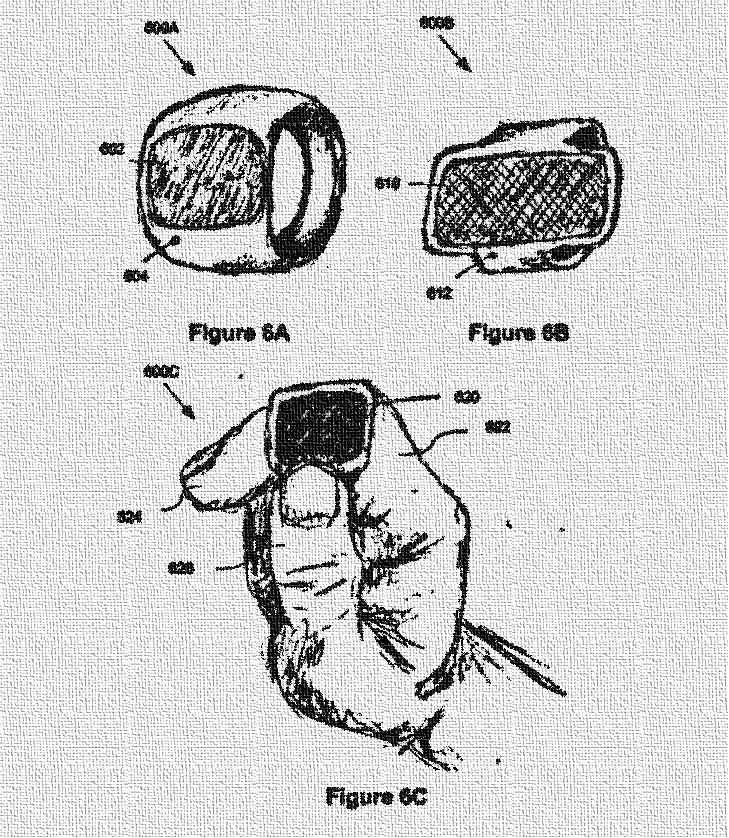
Я, признаться, сначала немного заволновался, что купертиновцы умудрились запатентовать что-то на самом деле классное, но потом прочитал формулу. Вот как выглядит независимый пункт (перевод автоматический, но все понятно):
«1. Носимое кольцевое устройство, содержащее:
кольцевой элемент, образующий сквозное отверстие, размер которого позволяет вместить в него указательный палец руки пользователя;
компьютерный процессор, размещенный в кольцевом элементе;
беспроводной приемопередатчик, электрически соединенный с процессором компьютера и сконфигурированный для связи по меньшей мере с одним внешним электронным устройством;
перезаряжаемый источник питания для подачи питания на беспроводной приемопередатчик и компьютерный процессор; и
микрофон, электрически соединенный с процессором компьютера;
где
беспроводной приемопередатчик сконфигурирован таким образом, что первый предварительно определенный жест рукой, выполняемый с использованием вызывного устройства, вызывает выполнение действия на внешнем электронном устройстве,
при этом первый заранее заданный жест рукой включает в себя перемещение кольцевого устройства,
и действие, выполняемое на внешнем электронном устройстве, включает в себя изменение переменного входа на внешнее электронное устройство, по меньшей мере частично, на основе расстояния кольцевого устройства относительно внешнего электронного устройства».
Специально выделил ключевые признаки. С нашими они пересекаются только в том, что кольцо подключается к смартфону. В следующем выпуске мы добавили управление жестами, но их описание было несколько иным, нежели у Apple. В общем, основной признак, который компания предпочла защитить, — это кольцо с жестовым управлением на основе размахивания рукой относительно устройства подключения. Мое личное мнение — это неверный ход. Примерно как голосовое управление в эпоху мессенджеров, которые как бы намекают, что общаться голосом — это вчерашний день. С жестами примерно то же самое. Однако за патент компания все-таки держится. И здесь есть такая мысль. Apple уже давно и многими воспринимается как компания, которая умеет выбирать технологию, перспективную к внедрению. Так было со сканерами отпечатка пальца, например. Аналогично и их не самые популярные решения оказываются востребованными. «Челка», отказ от разъема для наушников, комплектного зарядного устройства и т.п. А потому компания уже приучила нас, что если она сделала что-то, то не просто так. Однако история с Vision Pro показала, что пользователь уже не тот и выкладывать огромную сумму ради статуса бета-тестера не готов. А потому у компании проблема. На мой взгляд, Apple следует поступить как Xiaomi и создать пару дочерних фирм, которые будут выпускать пробные продукты, чтобы у самой Apple остались свобода маневра и не запятнанная финансовыми потерями репутация.
Кольцо считаю отличной идеей. Apple следует его выпустить. А остальные уже скопируют как надо. У нас в рубрике, если что, подсмотрят. Едем дальше.
Проблема
Итак, роботы. В том самом материале, ссылка на который приведена выше, Эльдар указал на один из основных доводов адептов концепции человекоподобных роботов, который состоит в том, что подобные устройства были бы удобны для работы с техникой, которая разрабатывается для человека. И вот здесь, как мне кажется, и кроется проблема, которую легко увидеть, если оценить вещественно-полевые ресурсы (ВПР), которые имеются в нашем распоряжении, когда мы говорим о роботах, и сравнить эти ресурсы с таковыми в той самой технике, управлять которой мы хотим их заставить.
Мы не будем сейчас рассматривать все возможные варианты. Давайте сконцентрируемся на типовых. Молоток и гвозди. Представляете, какой моторикой и ловкостью должны обладать пальцы робота, чтобы поднять гвоздь с пола? А если это гвоздь без шляпки для крепления наличников? А если место установки гвоздя находится в сантиметре от пола? Точно-точно нужны пальцы? Представили, как робот будет бить молотком по такому гвоздю? Уверен, вы согласитесь, что использование магнита и ударного устройства по типу расположенного в трубке груза, бьющего по шляпке этого гвоздя, будет куда практичнее.

Если же говорить о каких-то работах, связанных с использованием инструмента с вращающимися элементами, то стоит вспомнить о тех самых двигателях в теле самого робота. Это и есть ВПР, которые можно использовать. Следовательно, городить кучу переходников, чтобы преобразовать одно вращение в другое, просто нет смысла.
Работа же с компьютерами и вовсе не требует соответствия конструкции человеческого тела из-за развития беспроводных подключений всех мастей.
Единственное, что потребуется, — это адаптация такой бытовой техники, которая пока еще не поумнела. Плиты, микроволновки, стиральные машины. Но и здесь вопрос скорее времени, нежели недостатка технологий.
То, что все взялись за роботов, — это не прогресс, а масштабирование наработанных технологий. Электроприводы, куча шарниров, гироскопы, процессоры, программное обеспечение и аккумуляторы. Вот и все. Производственные роботы типа KUKA умели практически все, что сегодня показывают человекоподобные роботы. Разве что на месте стояли.
Сегодня же все уперлось в миниатюризацию и автономность. А это сложно назвать прогрессом, если итогового человекоподобного робота потом используют ради имиджа, а не из соображений автоматизации. Давайте же попробуем представить, как бы выглядел манипулятор робота, который можно было бы представить в качестве универсального.
Уровень техники
Для начала рассмотрим традиционного человекоподобного робота. Выглядят они все примерно одинаково. Разве что сегодня они несколько меньше в отдельных узлах:
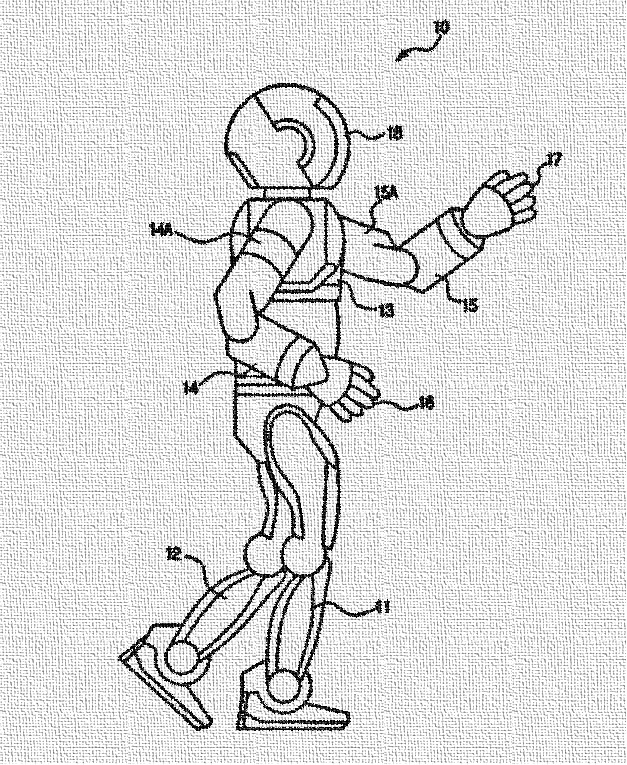
Однако давайте представим этого робота не в тепличной обстановке, а там, где им логично заменить утомившегося человека. Например, среди нескольких стеллажей, куда постоянно нужно наклоняться, доставать что-то. Переставлять и т.п.
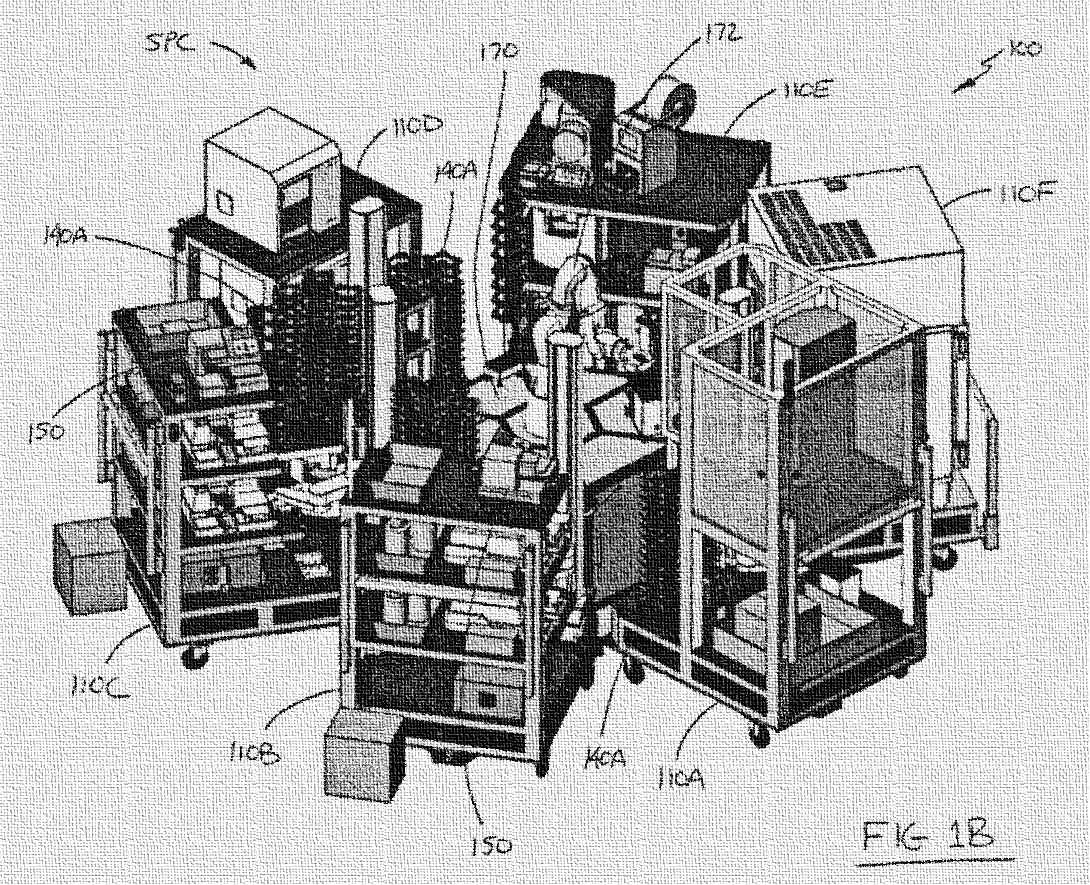
Насколько лучше справится железяка на ногах и с руками? Вообще, не лучше. Если одна-единственная всеракурсная рука во мгновение ока будет доставать, переставлять и возвращаться снова, вращаясь вокруг центра своего основания, то наклоны, удержание равновесия, перестановки ног и прочие остающиеся за кадром нормального функционирования операции двуногого робота если не разрядят его, то он точно будет гораздо медленнее. И это мы еще глюков не касаемся.
Но не все так лучезарно и в отношении робота-руки. Удержать что-то сложной формы или больших габаритов ему будет тяжеловато. Возможно, стоит подумать о двух руках?
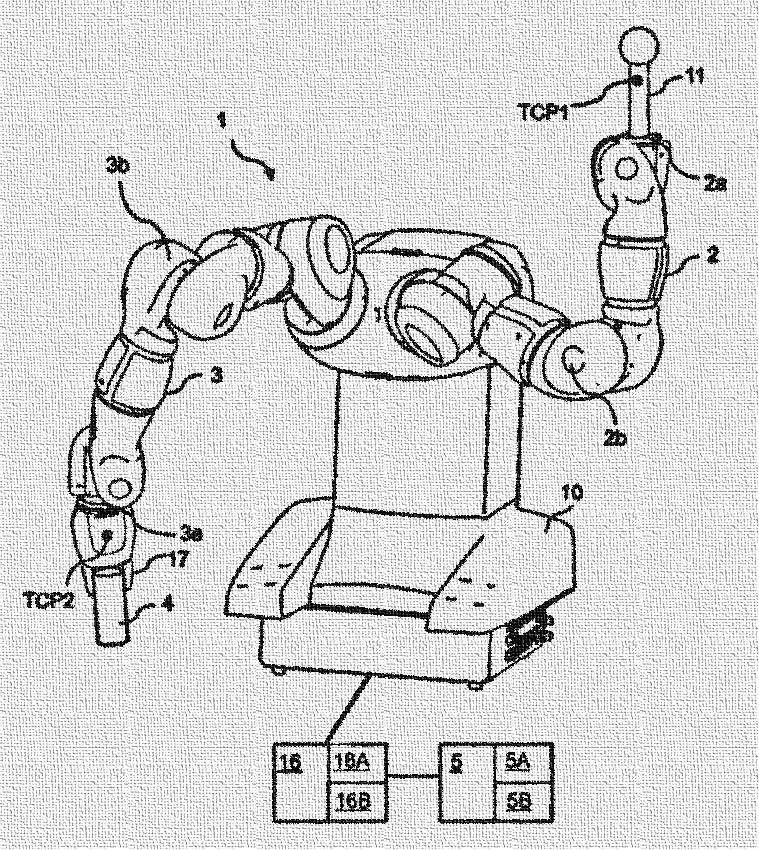
Этот вариант лучше. При фиксации его основания хватательные функции возрастут. Особенно если задействовать разные насадки на концах манипуляторов. А в основание встроить несколько сменных устройств, которые бы перещелкивались под задачу. Что-то подобное мы уже вроде патентовали. Но сегодня задача другая. От нас требуется универсальная «хваталка». Именно так ее и назвал Lecron:
«Для использования человеческого инструментария, нужна человеческая хваталка. Иначе, либо дублирование инструментария, либо отказ от человеческого. Переходник с одного на второй представить трудно».
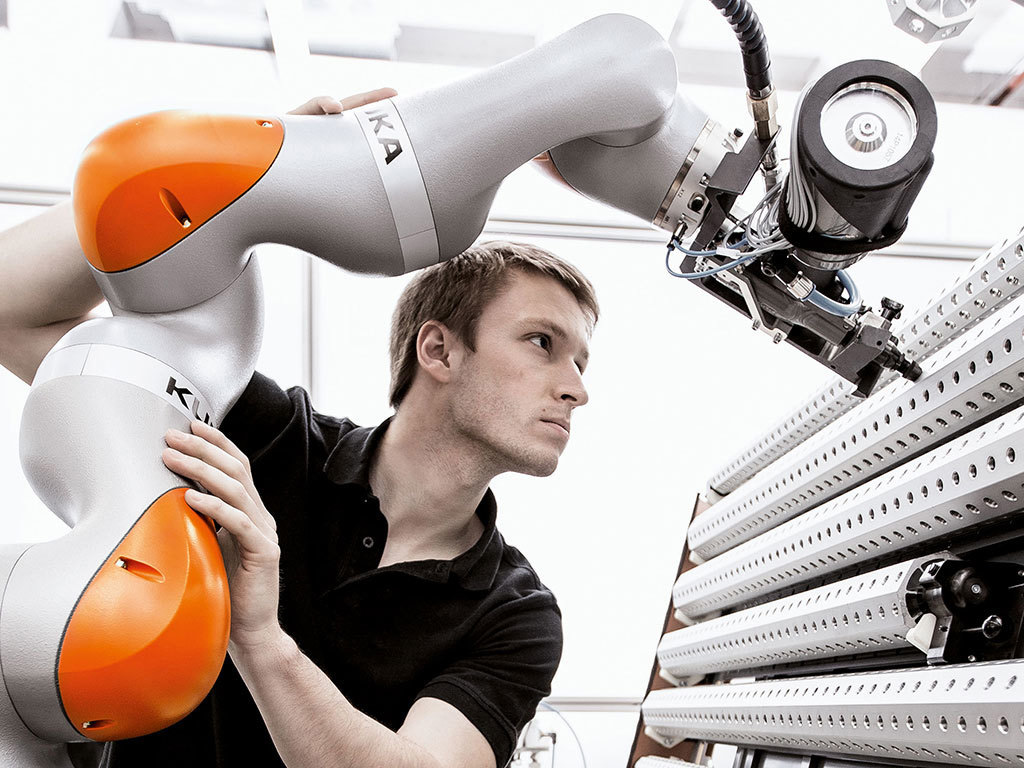
Наиболее интересным аналогом в этой части будет следующий:
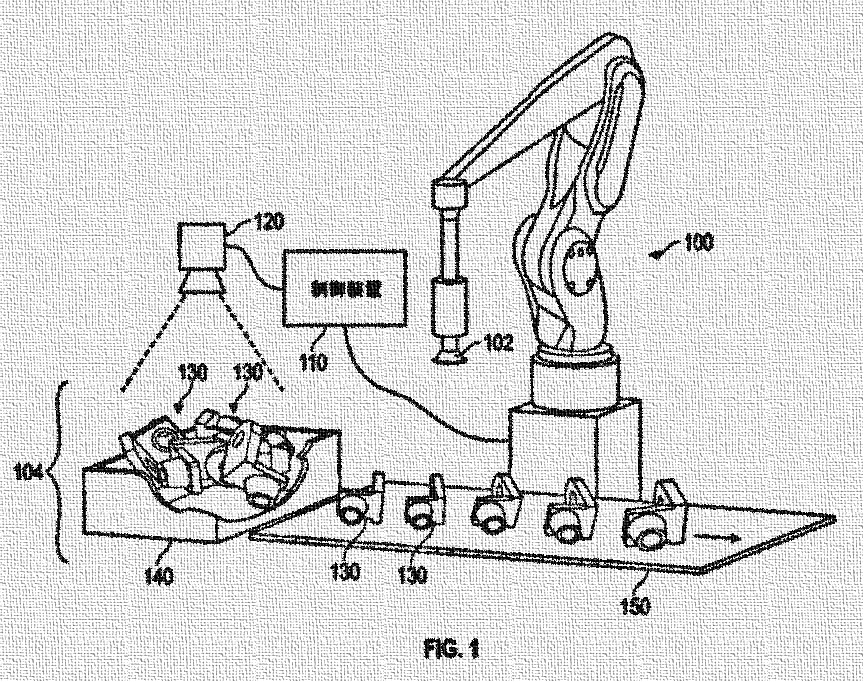
Это вариант промышленного робота, который захватывает детали из контейнера с помощью вакуумного удержания, разворачивает нужным образом и укладывает на конвейерную ленту. Нас здесь интересует именно насадка с возможностью удержания предметов посредством вакуумирования ее поверхности. Но мы ее немного додумаем. В частности, нам нужно сделать так, чтобы эта вакуумируемая насадка могла прилипать к рукояти двери, чтобы открыть ее. А также будет вообще отлично, если она сможет ухватить шуруповерт и что-нибудь просверлить.
Осуществление изобретения
Робот с манипулятором, выполненным в соответствии с настоящим изобретением, движется по коридору до двери, за которой находится ящик с инструментом, который ему необходим для выполнения поставленной перед ним задачи. Он приблизился к двери. Камера робота распознала рукоять, которая представляет собой устройство круглой формы, отпирающее дверь при повороте. Робот активирует манипулятор, насадка которого представляет собой подушку. При приближении подушки к рукояти и соприкосновении с ней поверхность подушки проминается, обволакивая рукоять со всех сторон. Это может достигаться, например, посредством вытеснения гранул (или жидкости) в свободные полости подушки. Далее материал подушки меняет свое состояние, что приводит к более плотному сцеплению с рукоятью. Это может достигаться как посредством вакуумирования поверхности материала подушки, что приводит к прилипанию насадки к рукояти, так и посредством использования специального материала, подверженного изменению своих характеристик при воздействии на него, например, электрического тока. Далее манипулятор за счет шарнира в конструкции поворачивает насадку, и дверь открывается. Аналогичным образом робот захватывает ящик с инструментами и, разместив его на ходовой части, отправляется к месту использования инструмента. Прибыв на место, робот открывает ящик. Это происходит посредством использования второго манипулятора, насадка которого выполнена в соответствии с дополнительным пунктом формулы изобретения и представляет собой подушку в форме тора, в отверстие которой установлен механический захват. Это позволяет взаимодействовать с твердыми мелкими объектами, работа с которыми будет невозможна посредством вакуумного удержания. Механический захват может быть также выполнен, например, магнитным, телескопическим и т.п. Таким образом, это позволит роботу одним манипулятором с подушкой «обнять» с внешней стороны рукоять дрели, а вторым манипулятором ухватить ее с внутренней стороны и одновременно выдвинуть механический захват, чтобы нажать на кнопку.
Формула изобретения
- Насадка на манипулятор, содержащая корпус и коннектор;
- упомянутый корпус выполнен в виде подушки, выполненной с возможностью изменения формы с последующей ее фиксацией.
- Насадка на манипулятор по п.1, отличающаяся тем, что подушка выполнена герметичной и содержит внутри гранулы, а коннектор выполнен с возможностью вакуумирования внутренней полости подушки.
- Насадка на манипулятор по п.1 и п.2, отличающаяся тем, что материал подушки выполнен с возможностью вакуумирования пространства между ним и поверхностью соприкасающегося с ним предмета.
- Насадка на манипулятор по п.1 – п.3, отличающаяся тем, что подушка выполнена в виде тора.
- Насадка на манипулятор по п.4, отличающаяся тем, что подушка выполнена в виде тора и имеет в центральной части механический захват.
- Насадка на манипулятор по п.5, отличающаяся тем, что механический захват выполнен телескопическим.
- Насадка на манипулятор по п.5 и п.6, отличающаяся тем, что захват выполнен магнитным.
И даже несмотря на то, что, с точки зрения ТРИЗ, подобное развитие манипулятора является верным (увеличение количества шарниров до максимального числа), его использование для управления устройствами, разработанными для человека, вызывает много вопросов.
Приглашаем покритиковать в комментарии.
Смелых идей, отличных изобретений и успешных продуктов. Удачи!