Привет.
Я не сторонник роботов-пылесосов. Мне не нравится их форма, самостоятельность у них далеко не абсолютная, и при плотной заставленности квартиры они ничего нормально не уберут. Особенно умиляет, когда такой робот-помощник оставит в каком-нибудь труднодоступном углу шмат кошачьей шерсти, а кот после уборки его на хвосте притащит в середину комнаты. Труженик-пылесос же будет в этом момент стоять на базе и заряжаться с чувством выполненного долга. Самообман, короче, какой-то. Но я наслышан об их работе исключительно из вторых рук. У меня такого нет, а критика со стороны владельцев не позволяет рискнуть деньгами в попытке опровергнуть мнение друзей и знакомых. Те же, кто хвалит его, — это люди с квартирой-стадионом в 180 квадратных метров, по которой дети ездят на велосипеде. В таких условиях, наверное, пассивная помощь в виде робота, отлавливающего перекатывающуюся шерсть по паркету, не повредит. Прошелся потом по плинтусам и углам, и нормально. Но что, если есть решение? Оставайтесь с нами, скоро мы его обсудим. Но сначала несколько слов по недавнему изобретению.
Обратная связь
В прошлом «Уголке» мы говорили про механику управления информацией на экране электронных устройств посредством касаний и коротких свайпов. Изначальная идея вращалась вокруг исключительно тапов, но мы вынужденно ее расширили до жестов, чтобы уложиться в изобретательский уровень. О том, что такое изобретательский уровень, можно почитать в одном из наших материалов рубрики «Патентный ликбез». Самый первый выпуск, кстати. С изобретением же можно ознакомиться по ссылке ниже:
Если кратко, то смысл решения состоит в том, чтобы максимально приблизить чтение, например, статей на новостных информационных порталах к таковому в программах-читалках. Чтобы за один раз можно было пролистывать целый экран аналогично тому, как в ридерах перелистывается страница. Ну и возвращаться к началу и концу текста также по нажатию на одну кнопку. Изначальный расчет был на дополнительные наэкранные кнопки в том месте экрана, где желает пользователь. Очевидным минусом мне показались случайные нажатия. Согласитесь, эта дополнительная кнопка легко может попасть под палец. Кроме того, я еще не встречал органично смотрящейся плавающей кнопки. У некоторых приложений для записи экрана есть такая. Она едва заметная, у нее есть настраиваемая прозрачность, но она все равно создает мусор на экране. Потому, собственно, и была описана некоторая зона, из которой нужно было бы делать короткий свайп. Зону можно сделать полностью прозрачной, но при этом на экране появится дополнительный элемент управления. На мой взгляд, идеально. Но Lecron как автор оригинальной идеи не согласился. Дело в том, что в описании мы упустили некоторые сценарии использования, в которых может потребоваться исключительно нажатие. Например, когда ты развалился в шезлонге, согнув колени, облокотил на них планшет, лениво положил рядом руку и только лишь едва заметно отгибаешь палец для взаимодействия с экраном. На свайп в таких условиях маневра не хватит. Как же быть?
Решение, на самом деле, есть. Причем на базе того изобретения, что мы и описали. Однако мы все еще не должны уходить в сторону исключительно касаний. Должны быть жесты. Смотрите, что мы поменяем:
1. Способ навигации по информации на электронном устройстве с дисплеем, состоящий в том, что:
- пользователь указывает размер по меньшей мере одной зоны на дисплее, из которой будет осуществляться жест по экрану;
- пользователь указывает длину жеста в интервале от 0 до 50 мм;
- пользователь назначает жестам команды.
Все. А теперь готовимся восхищаться. Если разместить четыре зоны на экране с длиной жеста в 0 мм, то это и получатся кнопки. Изобретение же при этом — это управление жестами. Именно при использовании подобных приемов и происходит пересечение изобретательских решений. Поэтому и требуется долгая подготовка в процессе патентных исследований, поиск по множеству баз данных и максимально точные формулировки, чтобы каким-нибудь незначительным нововведением конкурент не смог обойти ваш патент. Едем дальше.
Проблема
Я не сторонник человекоподобных роботов. Мне они кажутся нелепыми и избыточными для тех узконаправленных задач, к которым их сегодня готовят. Илон Маск как-то показывал, как они собирают себе подобных.
Выглядит впечатляюще, пока не вспоминаешь, как с десяток манипуляторов в несколько секунд варят корпус автомобиля на конвейере. Заменить их на таких вот «Оптимусов», и процесс растянется на часы (если не дни). Потому мне видится логичной разработка роботов под задачи. Если нужно крутить гайки, то манипулятор с шуруповертом со сменными насадками куда удобнее, нежели человекоподобный робот, который понесет этот шуруповерт. Но что делать, если это не конвейер, а стройка где-нибудь за городом? Там неудобно иметь десяток роботов на каждый чих, особенно если приходится перемещаться по территории. Будем выдумывать.
Уровень техники
В патентном фонде огромное количество заявок и выданных патентов на роботов. В том числе человекоподобных:
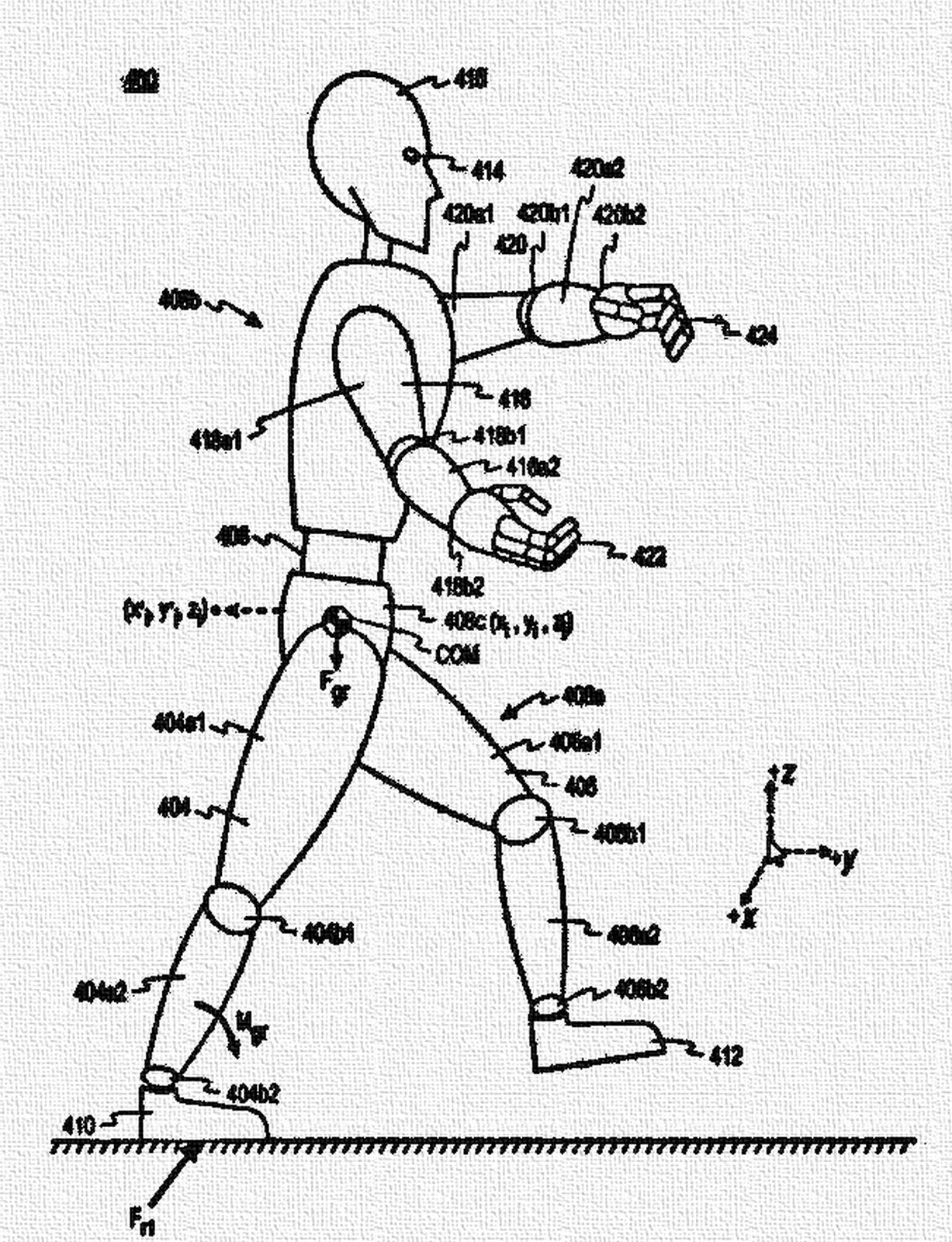
И несмотря на возможность изготовления такого устройства, гораздо большую функциональность его «суставов» и большую прочность «костей», узких мест хватает как в конструкции, так и в концепции:
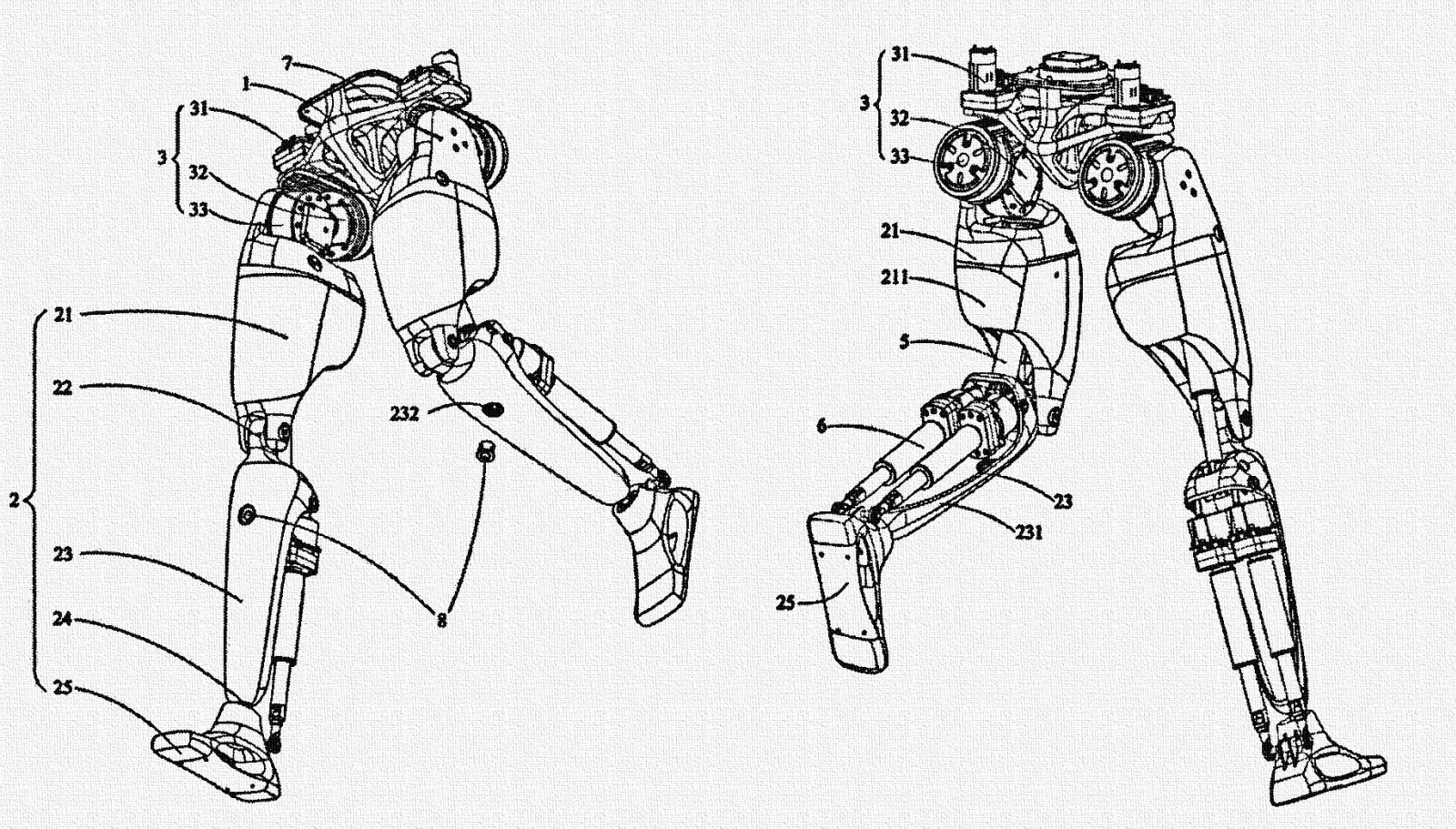
Например, ноги с иллюстрации выше. Что быстрее перемещается, ноги или, например, колеса или гусеницы? К чему такая конструкция? Или гипотетическая ситуация: робот стоит в проходе, и ему внезапно понадобилось развернуться на сто восемьдесят градусов и пойти. В этой ситуации робот, на ногах которого стопы, полностью повторяющие человеческие (с пяткой и носком), и гнущиеся только в одну сторону колени, сначала потопчется на месте и только потом куда-то пойдет. Или руки:
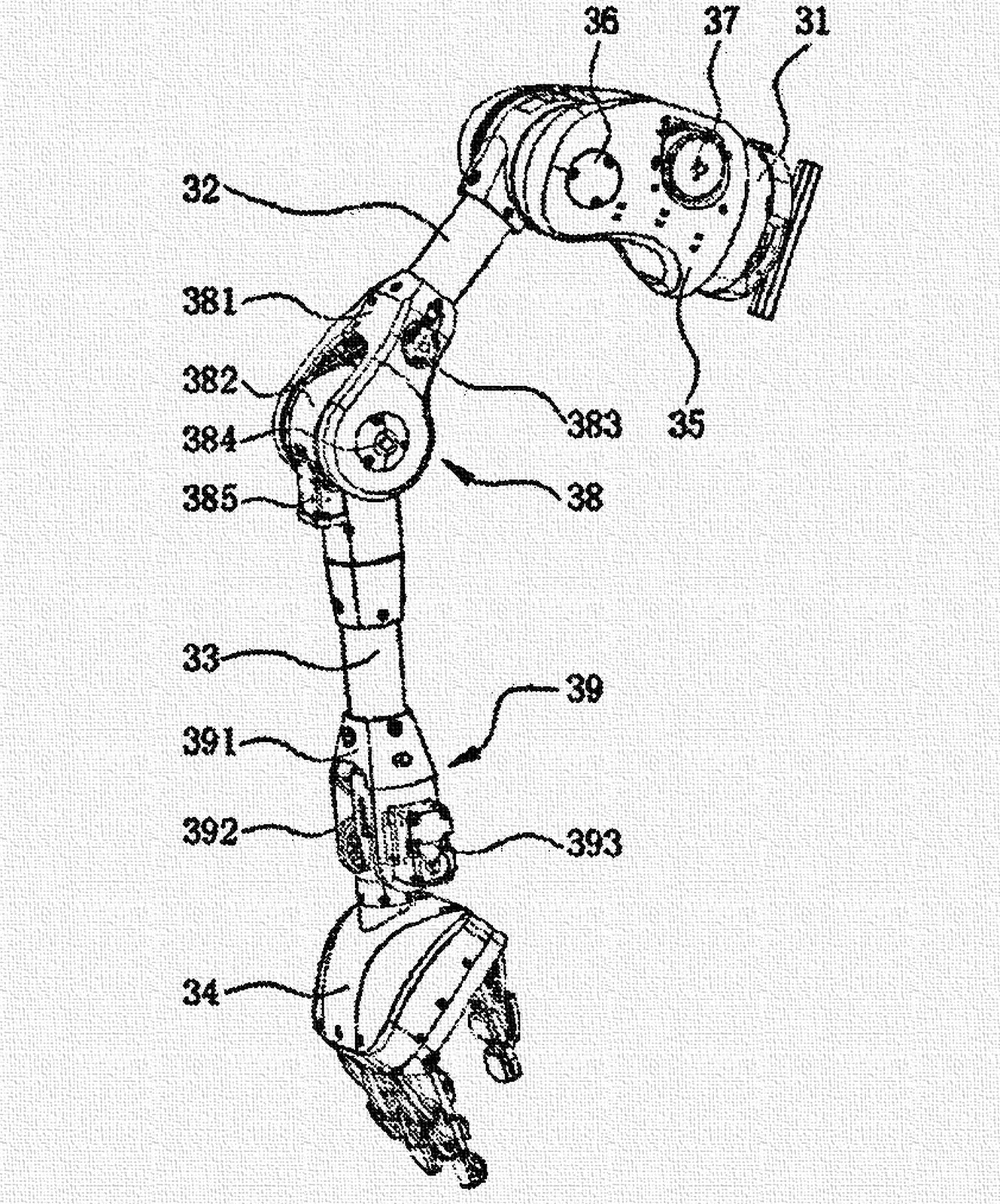
Пальцы. Это для чего? Едва ли для обручального кольца. Безусловно, ухватить рукоять шуруповерта так проще, но что-то я сильно сомневаюсь, что банальный десятикилограммовый пакет из «Магнита» нежные микроскопические приводы выдержат. Крюк из прута справился бы куда лучше. При этом не забываем, что если такого робота отправить пылесосить, то он еще и места будет кучу занимать. Еще один пример. Робот-пылесос.
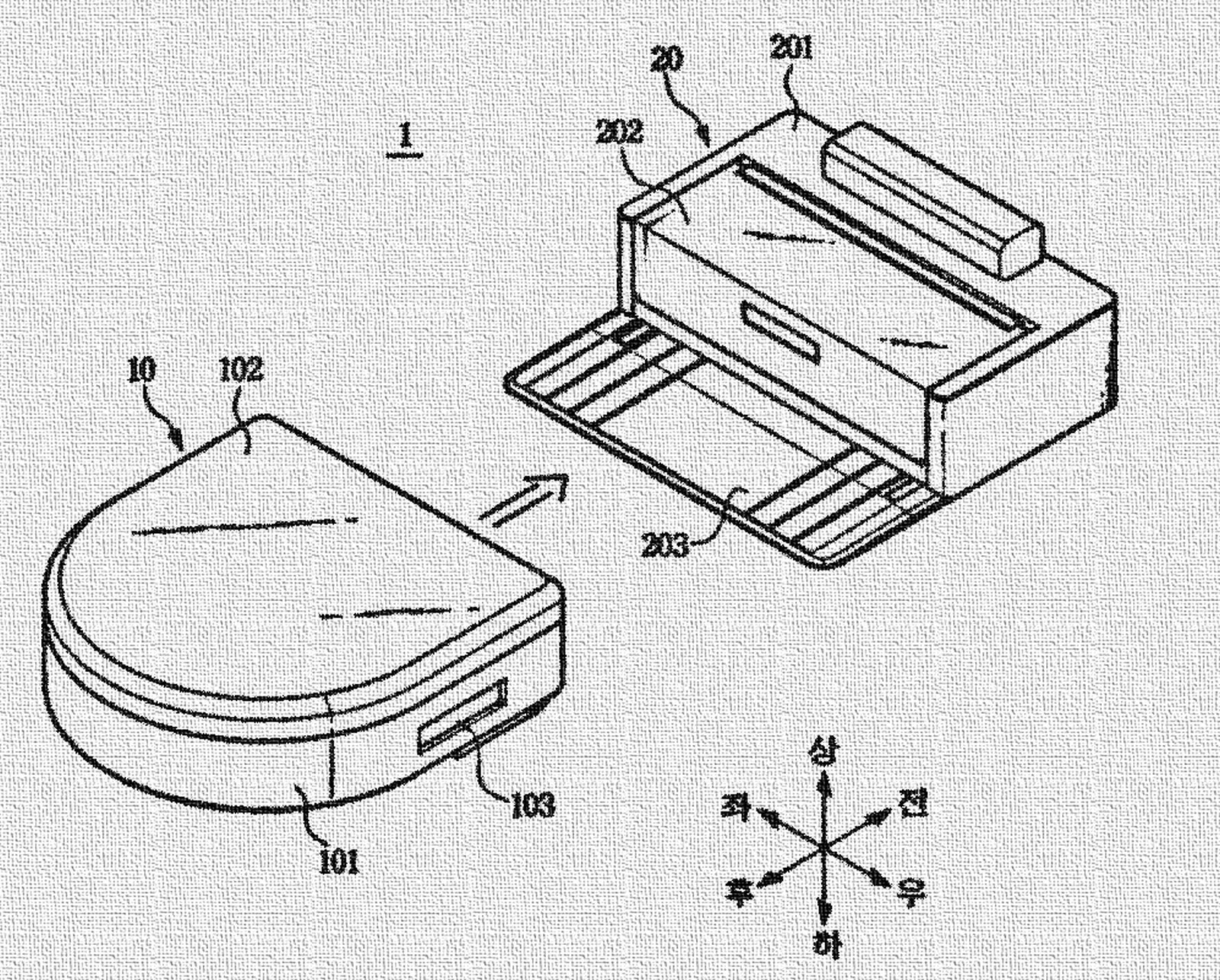
Выше изображен типовой вариант. Как уже упоминалось, он имеет свойство застревать в узких местах или под недостаточно высокими для его перемещения диванами и шкафами. Кроме того, он не всегда хорошо очищает поверхности в труднодоступных местах. Человек же с ручным пылесосом справился бы наверняка. Однако нужен ли для этого человекоподобный робот? Я считаю, что нет. В том же первом «Патентном ликбезе» мы написали формулу для универсального робота. Он в соответствии с ней выглядел вот так:
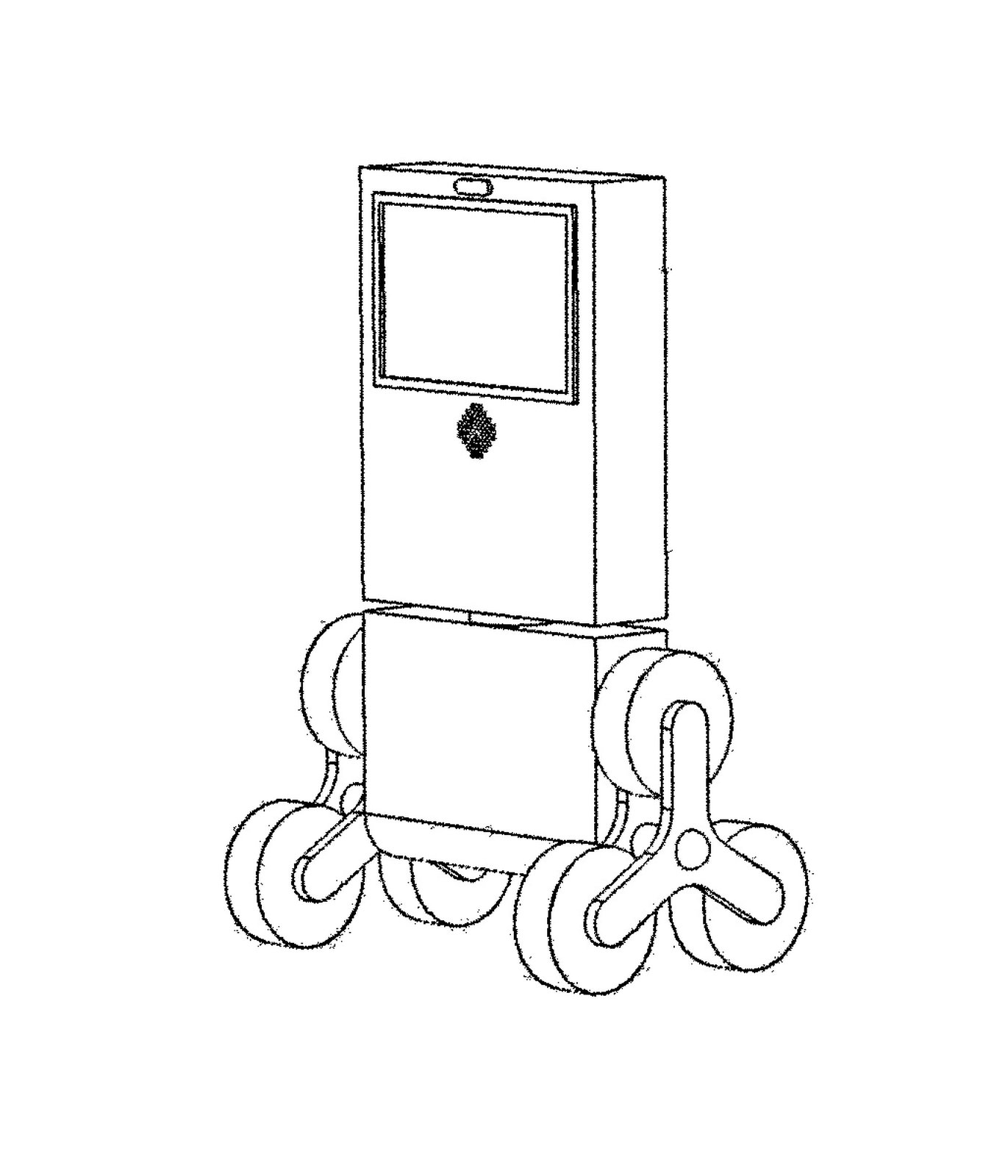
И на его основе вполне можно сделать отличный частный вариант, который будет универсальным. В этот раз в уборке. Этого мы добьемся благодаря модульной конструкции.
Осуществление изобретения
Напольный модуль робота-пылесоса перемещается по квартире пользователя, осуществляя уборку. Не имея возможности вычистить пространство в углу за напольным горшком с домашней пальмой, робот отмечает место на своей интерактивной карте как препятствие и продолжает уборку на остальной площади квартиры. Вернувшись на базу, он передает сигнал основному модулю робота-пылесоса о неочищенном месте. Основной модуль представляет собой блок с ходовой частью, который может перемещаться вместе со всеми вспомогательными модулями для их передислокации на новое место в тех случаях, если самостоятельное осуществление ими данного маневра невозможно. Например, при необходимости уборки между этажами. Основной модуль после получения информации о месте загрязнения от напольного модуля отправляется к искомой точке посредством ходовой части. Ходовая часть может быть выполнена в виде колес или гусениц и имеет возможность перемещения по лестницам. Когда робот оказывается непосредственно в указанном напольным модулем месте, из корпуса выдвигается манипулятор, удерживающий гибкий шланг, наконечник которого выполнен с возможностью установки сменных насадок. Камера основного модуля направляет манипулятор со шлангом для очистки поверхности, оказавшейся недоступной для напольного модуля. После устранения загрязнения манипулятор задвигается в корпус. Также в соответствии с дополнительным пунктом формулы изобретения робот-пылесос содержит модуль для очистки поверхностей столов. Его использование выглядит следующим образом. Робот-пылесос перемещается до объекта, поверхность которого располагается выше поверхности пола, но обозначена как обязательная для уборки. Это может быть стол, тумба или даже шкаф. Манипулятор, ранее удерживающий гибкий шланг, закрепляется на настольном модуле и перемещает его на искомую поверхность. Настольный модуль осуществляет уборку, например, на столе. Встретив препятствие (например, вазу), он отмечает его в своей интерактивной карте и передает информацию основному модулю. Основной модуль перемещается посредством ходовой части до точки, максимально близкой к препятствию на столе, и, используя камеру и манипулятор, перемещает препятствие, чтобы освободить пространство для уборки. После завершения процесса очистки поверхности стола настольный модуль подает сигнал основному модулю, и манипулятор сначала захватывает, а затем и устанавливает настольный модуль в корпус основного. Далее основной модуль направляется к месту зарядки, которое может быть реализовано как в виде обычной розетки, к которой робот-пылесос подключается посредством манипулятора, захватывающего вилку из корпуса аналогично шлангу или настольному модулю, так и с помощью заблаговременной установки в розетках специальных коннекторов, к которым основной модуль просто прислоняется.
Использование манипулятора со шлангом и сменными насадками также уместно при очистке вертикальных поверхностей, например, стен.
Формула изобретения
1. Робот-пылесос, содержащий корпус, ходовую часть, устройство всасывания пыли, электронные компоненты, по меньшей мере одну камеру, аккумулятор, блок памяти и программное обеспечение;
- упомянутый корпус содержит по меньшей мере один модуль для очистки пола;
- упомянутый корпус также содержит манипулятор, выполненный с возможностью удержания и перемещения устройства всасывания пыли;
- упомянутое программное обеспечение, камера, электронные компоненты и ходовая часть выполнены с возможностью обеспечения как перемещения робота-пылесоса по поверхности пола при наличии препятствий, так и устранения препятствий для работы дополнительных модулей.
2. Робот-пылесос по п.1, отличающийся тем, что упомянутое устройство всасывания представляет собой гибкий шланг, выполненный с возможностью изменения длины.
3. Робот-пылесос по п.1 и п.2, отличающийся тем, что упомянутый корпус содержит отсек со сменными насадками для устройства всасывания.
4. Робот-пылесос по п.1 — п.3, отличающийся тем, что основной корпус содержит дополнительный модуль для очистки плоских поверхностей, расположенных выше поверхности пола.
5. Робот-пылесос по п.1 — п.4, отличающийся тем, что ходовая часть выполнена в виде двух соединенных с корпусом с возможностью вращения рычагов, содержащих по меньшей мере два колеса.
Вот такой робот-матрешка. Профессиональные инструменты для каждой задачи, не связанные между собой, — это накладно. Но вот если они будут в одном роботе — это уже другое дело. Мы рассмотрели пример реализации робота-уборщика. Мы не касались тонкостей технической части вроде вращающихся валиков, которые в свое время стали предметом споров и судебных исков, но, тем не менее, можно с уверенностью сказать, что критерию «промышленная применимость» изобретение соответствует. Аналогичного робота можно спроектировать и для уборки территории. В больнице он бы справился с перемещением лекарств по палатам. Но повторюсь. Человеческого вида такие машины точно не требуют.
Милости просим делиться вашими идеями в комментарии.
Смелых идей, отличных изобретений и успешных продуктов. Удачи!